D3DXMatrixRotationYawPitchRoll 関数 (D3dx9math.h)
注意
D3DX ユーティリティ ライブラリは非推奨です。 代わりに DirectXMath を使用することをお勧めします。
ヨー、ピッチ、ロールを指定してマトリックスを作成します。
構文
D3DXMATRIX* D3DXMatrixRotationYawPitchRoll(
_Inout_ D3DXMATRIX *pOut,
_In_ FLOAT Yaw,
_In_ FLOAT Pitch,
_In_ FLOAT Roll
);
パラメーター
-
pOut [in, out]
-
種類: D3DXMATRIX*
操作の結果である D3DXMATRIX 構造体へのポインター。
-
Yaw [in]
-
型: FLOAT
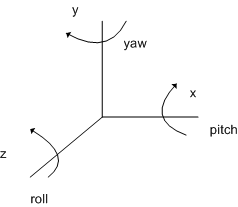
y 軸の周りのヨー (ラジアン単位)。
-
ピッチ [入力]
-
型: FLOAT
x 軸の周りのピッチ (ラジアン単位)。
-
ロール [入力]
-
型: FLOAT
z 軸をラジアンで回転します。
戻り値
種類: D3DXMATRIX*
ヨー、ピッチ、ロールを指定した D3DXMATRIX 構造体へのポインター。
解説
この関数の戻り値は、 pOut パラメーターで返される値と同じです。 このようにして、 D3DXMatrixRotationYawPitchRoll 関数を別の関数のパラメーターとして使用できます。
変換の順序は最初にロール、次にピッチ、次にヨーです。 次の図に示すように、オブジェクトのローカル座標軸を基準にして、z 軸の周りの回転、x 軸の周りの回転、y 軸の周りの回転と同じです。
要件
| 要件 | 値 |
|---|---|
| ヘッダー |
|
| ライブラリ |
|
関連項目