Azure Kinect DK 坐标系
本文介绍用于 2D 和 3D 坐标系的约定。 每个传感器设备有关联的独立坐标系,使用校准函数可以转换这些坐标系之间的点。 转换函数转换坐标系之间的整个图像。
2D 坐标系
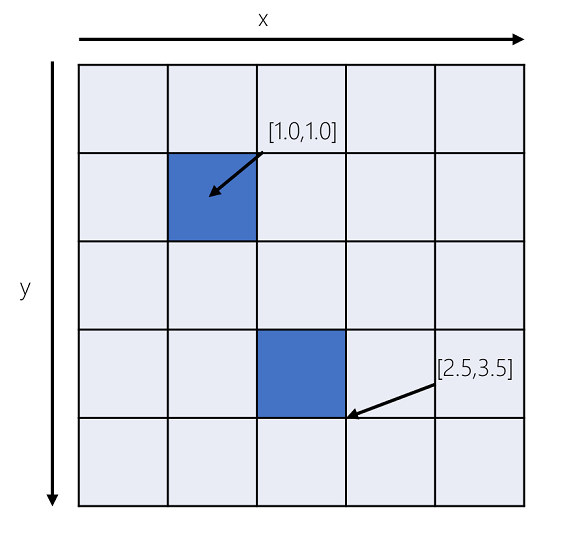
深度相机和彩色相机与独立的 2D 坐标系相关联。 [x,y] 坐标以像素为单位,其中,x 的范围为 0 到宽度-1,y 的范围为 0 到高度-1。 宽度和高度取决于所选的深度相机和彩色相机工作模式。 像素坐标 [0,0] 对应于图像的左上角像素。 像素坐标可以是表示子像素坐标的小数。
2D 坐标系以 0 为中心,即,子像素坐标 [0.0, 0.0] 表示中心,[0.5,0.5] 表示像素的右下角,如下所示。
3D 坐标系
每个相机、加速度传感器和陀螺仪都与独立的 3D 坐标空间系统相关联。
3D 坐标系中的点以指标 [X,Y,Z] 坐标三元组的形式表示,单位为毫米。
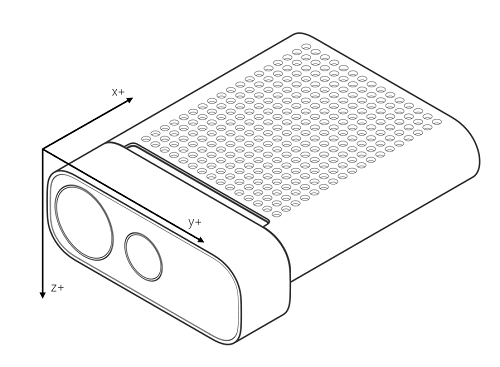
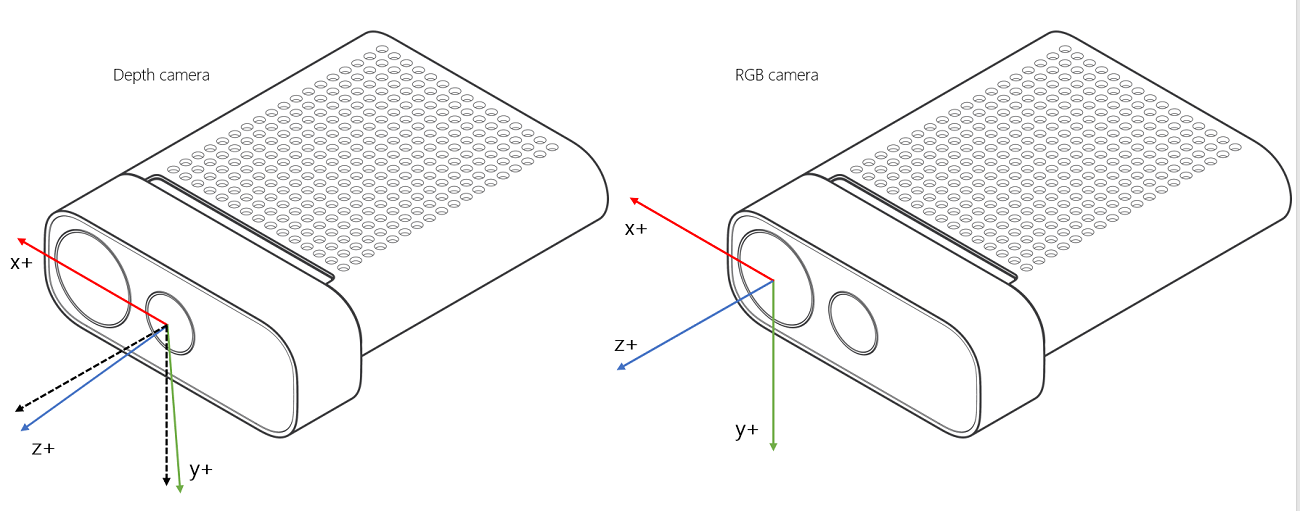
深度相机和彩色相机
原点 [0,0,0] 位于相机焦点处。 坐标系的方向是正 X 轴向右,正 Y 轴向下,正 Z 轴向上。
深度相机向下朝彩色相机倾斜 6 度,如下所示。
深度相机使用两个照明器。 在窄视场 (NFOV) 模式下使用的照明器与深度相机的用例相符,因此照明器不倾斜。 在宽视场 (WFOV) 模式下使用的照明器相对于深度相机向下额外倾斜 1.3 度。
陀螺仪和加速度传感器
陀螺仪的原点 [0,0,0] 与深度相机的原点相同。 加速度传感器的原点与其物理位置相一致。 加速计和陀螺仪的坐标系统都位于右侧。 坐标系的正 X 轴向后,正 Y 轴向左,正 Z 轴向下,如下所示。