你当前正在访问 Microsoft Azure Global Edition 技术文档网站。 如果需要访问由世纪互联运营的 Microsoft Azure 中国技术文档网站,请访问 https://docs.azure.cn。
空间分析操作
重要
2025 年 3 月 30 日,Azure AI 视觉空间分析将停用。 请在指定日期之前转换到 Azure AI 视频索引器或其他开放源代码解决方案。 我们建议你尽快进行切换,以获取 Azure AI 视频索引器更丰富的权益。 除了你正在使用的熟悉的功能之外,这里还对 Azure AI 视觉空间分析和 Azure AI 视频索引器进行了快速比较。
| 功能 | Azure AI 视觉空间分析 | Azure AI 视频索引器 |
|---|---|---|
| Edge 支持 | 是 | 是 |
| 对象检测 | 仅人员与车辆检测 | 检测 1000 多个对象 |
| 音频/语音处理 | 不支持 | 支持(包括语音听录、翻译和摘要) 支持 >(包括语音听录和情绪分析) |
| 事件检测和跟踪 | 支持(跟踪人员和车辆、事件检测) | 在 Edge 中尚不受支持。 在云中部分受支持。 |
| Azure Arc 支持 | 不支持 | 原生支持 |
| 关注的领域 | 使用专用跟踪进行可视化分析 | 全面分析音频和视频内容 |
从现在起至 2025 年 3 月 30 日,你可以继续使用 Azure AI 视觉空间分析,也可以在指定日期之前转换到 Azure AI 视频索引器。 2025 年 3 月 30 日之后,空间分析容器将不再受支持,将停止处理新流。
通过空间分析,你可以实时分析照相机设备的视频流。 对于你配置的每个相机设备,空间分析操作会生成发送到 Azure IoT 中心实例的 JSON 消息输出流。
空间分析容器实现以下操作。 可在容器的部署清单中配置这些操作。
| 操作标识符 | 说明 |
|---|---|
cognitiveservices.vision.spatialanalysis-personcount |
计算照相机视野中指定区域的人数。 区域必须完全由一个相机覆盖,PersonCount 才能准确记录总人数。 发送初始 personCountEvent 事件,然后在计数发生更改时发送 personCountEvent 事件。 |
cognitiveservices.vision.spatialanalysis-personcrossingline |
跟踪人员在相机视野中越过指定线的时间。 当有人越线时发送 personLineEvent 事件,并提供方向信息。 |
cognitiveservices.vision.spatialanalysis-personcrossingpolygon |
当有人进入或离开指定区域时,发送 personZoneEnterExitEvent 事件,并提供方向信息以及已跨越过的区域侧。 当有人离开区域时发送 personZoneDwellTimeEvent,并提供方向信息以及人员在该区域内停留的毫秒数。 |
cognitiveservices.vision.spatialanalysis-persondistance |
跟踪人员违反最小距离规则的时间。 定期发送 personDistanceEvent,包含每次违反距离规则的位置。 |
cognitiveservices.vision.spatialanalysis |
可用于运行上述提到的所有方案的常规操作。 当你想要在同一相机上运行多个方案或想要更有效地使用系统资源(例如 GPU)时,此选项更加有用。 |
在服务的 .debug 版本中(例如 cognitiveservices.vision.spatialanalysis-personcount.debug)也提供了上述所有操作。 调试功能可以在处理视频帧的同时将其可视化。 需要在主机计算机上运行 xhost +,才能实现视频帧和事件的可视化效果。
重要
Azure AI 视觉 AI 模型可以检测和定位视频片段中的人类,并输出一个边框圈住人体。 AI 模型不会尝试发现个人的身份或人口统计信息。
操作参数
下面是每个空间分析操作所需的参数。
| 操作参数 | 说明 |
|---|---|
Operation ID |
上表中的操作标识符。 |
enabled |
布尔值:true 或 false |
VIDEO_URL |
照相机设备的 RTSP url(示例:rtsp://username:password@url)。 空间分析通过 RTSP、http 或 mp4 支持 H.264 编码流。 Video_URL 可以使用 AES 加密,作为经过模糊处理的 base64 字符串值提供,如果视频 URL 经过模糊处理,则 KEY_ENV 和 IV_ENV 需要作为环境变量提供。 有关生成密钥和加密的实用工具示例,请参阅此处。 |
VIDEO_SOURCE_ID |
照相机设备或视频流的友好名称。 这将随事件 JSON 输出一起返回。 |
VIDEO_IS_LIVE |
对于照相机设备为 true,对于录制的视频为 false。 |
VIDEO_DECODE_GPU_INDEX |
用于解码视频帧的 GPU。 默认为 0。 应与其他节点配置(例如 DETECTOR_NODE_CONFIG 和 CAMERACALIBRATOR_NODE_CONFIG)中的 gpu_index 相同。 |
INPUT_VIDEO_WIDTH |
输入视频/流的帧宽度(例如 1920)。 这是可选字段,如果提供,帧将扩展到此维度,同时仍保留纵横比。 |
DETECTOR_NODE_CONFIG |
JSON,指示要在其上运行检测程序节点的 GPU。 该值应采用以下格式:"{ \"gpu_index\": 0 }", |
TRACKER_NODE_CONFIG |
JSON,指示是否在跟踪器节点中计算速度。 该值应采用以下格式:"{ \"enable_speed\": true }", |
CAMERA_CONFIG |
JSON,指示多个相机的校准相机参数。 如果你使用的技能需要校准并且你已有相机参数,可以使用此配置直接提供它们。 应采用以下格式:"{ \"cameras\": [{\"source_id\": \"endcomputer.0.persondistancegraph.detector+end_computer1\", \"camera_height\": 13.105561256408691, \"camera_focal_length\": 297.60003662109375, \"camera_tiltup_angle\": 0.9738943576812744}] }"其中 source_id 用于标识每个相机。 可从我们发布的事件的 source_info 获取它。 仅当 do_calibration=false 在 DETECTOR_NODE_CONFIG 中时生效。 |
CAMERACALIBRATOR_NODE_CONFIG |
JSON,指示要在哪个 GPU 上运行相机校准器节点,以及是否使用校准。 该值应采用以下格式:"{ \"gpu_index\": 0, \"do_calibration\": true, \"enable_orientation\": true}", |
CALIBRATION_CONFIG |
JSON,指示用于控制相机校准工作方式的参数。 该值应采用以下格式:"{\"enable_recalibration\": true, \"quality_check_frequency_seconds\": 86400}", |
SPACEANALYTICS_CONFIG |
区域和线的 JSON 配置,如下所述。 |
ENABLE_FACE_MASK_CLASSIFIER |
True 表示启用检测视频流中佩戴口罩的人数,False 表示禁用该功能。 默认情况下,此功能处于禁用状态。 口罩检测要求输入视频宽度参数为 1920 "INPUT_VIDEO_WIDTH": 1920。 如果检测到的人没有面向照相机或距离太远,则不会返回口罩属性。 有关详细信息,请参阅 相机位置。 |
STATIONARY_TARGET_REMOVER_CONFIG |
指示用于静止目标删除的参数的 JSON,它添加了一个功能,可用于学习和忽略长期静止的误报目标,如人体模型或图片上的人。 配置应采用以下格式:"{\"enable\": true, \"bbox_dist_threshold-in_pixels\": 5, \"buffer_length_in_seconds\": 3600, \"filter_ratio\": 0.2 }" |
检测器节点参数设置
下面是所有空间分析操作的 DETECTOR_NODE_CONFIG 参数的示例。
{
"gpu_index": 0,
"enable_breakpad": false
}
| 名称 | Type | 说明 |
|---|---|---|
gpu_index |
string | 此操作将在其上运行的 GPU 索引。 |
enable_breakpad |
bool | 指示是否启用 breakpad,用于生成故障转储以便进行调试。 默认情况下,它为 false。 如果将其设置为 true,则还需要在容器 createOptions 的 HostConfig 部分添加 "CapAdd": ["SYS_PTRACE"]。 默认情况下,故障转储会上传到 RealTimePersonTracking AppCenter 应用。如果要将故障转储上传到自己的 AppCenter 应用,可以使用自己应用的应用机密来替代环境变量 RTPT_APPCENTER_APP_SECRET。 |
相机校准节点参数设置
下面是所有空间分析操作的 CAMERACALIBRATOR_NODE_CONFIG 参数的示例。
{
"gpu_index": 0,
"do_calibration": true,
"enable_breakpad": false,
"enable_orientation": true
}
| 名称 | Type | 说明 |
|---|---|---|
do_calibration |
string | 指示已启用校准。 若要使 cognitiveservices.vision.spatialanalysis-persondistance 正常工作,do_calibration 必须为 true。
do_calibration 默认设置为 True。 |
enable_breakpad |
bool | 指示是否启用 breakpad,用于生成故障转储以便进行调试。 默认情况下,它为 false。 如果将其设置为 true,则还需要在容器 createOptions 的 HostConfig 部分添加 "CapAdd": ["SYS_PTRACE"]。 默认情况下,故障转储会上传到 RealTimePersonTracking AppCenter 应用。如果要将故障转储上传到自己的 AppCenter 应用,可以使用自己应用的应用机密来替代环境变量 RTPT_APPCENTER_APP_SECRET。 |
enable_orientation |
bool | 指示是否要计算检测到的人物的方向。
enable_orientation 默认设置为 True。 |
校准配置
下面是所有空间分析操作的 CALIBRATION_CONFIG 参数的示例。
{
"enable_recalibration": true,
"calibration_quality_check_frequency_seconds": 86400,
"calibration_quality_check_sample_collect_frequency_seconds": 300,
"calibration_quality_check_one_round_sample_collect_num": 10,
"calibration_quality_check_queue_max_size": 1000,
"calibration_event_frequency_seconds": -1
}
| 名称 | Type | 描述 |
|---|---|---|
enable_recalibration |
bool | 指示是否启用自动重新校准。 默认值为 true。 |
calibration_quality_check_frequency_seconds |
int | 每次质量检查之间的最小秒数,用于确定是否需要重新校准。 默认值为 86400(24 小时)。 仅当 enable_recalibration=True 时使用。 |
calibration_quality_check_sample_collect_frequency_seconds |
int | 收集新数据样本进行重新校准和质量检查之间相隔的最小秒数。 默认值为 300(5 分钟)。 仅当 enable_recalibration=True 时使用。 |
calibration_quality_check_one_round_sample_collect_num |
int | 每轮样本收集要收集的最小新数据样本数。 默认值为 10。 仅当 enable_recalibration=True 时使用。 |
calibration_quality_check_queue_max_size |
int | 校准相机模型时要存储的最大数据样本数。 默认值为 1000。 仅当 enable_recalibration=True 时使用。 |
calibration_event_frequency_seconds |
int | 相机校准事件输出频率(秒)。
-1 的值指示不应发送相机校准,除非相机校准信息已更改。 默认值为 -1。 |
相机校准输出
下面是相机校准输出(如果已启用)的示例。 省略号表示列表中的更多相同类型的对象。
{
"type": "cameraCalibrationEvent",
"sourceInfo": {
"id": "camera1",
"timestamp": "2021-04-20T21:15:59.100Z",
"width": 512,
"height": 288,
"frameId": 531,
"cameraCalibrationInfo": {
"status": "Calibrated",
"cameraHeight": 13.294151306152344,
"focalLength": 372.0000305175781,
"tiltupAngle": 0.9581864476203918,
"lastCalibratedTime": "2021-04-20T21:15:59.058"
}
},
"zonePlacementInfo": {
"optimalZoneRegion": {
"type": "POLYGON",
"points": [
{
"x": 0.8403755868544601,
"y": 0.5515320334261838
},
{
"x": 0.15805946791862285,
"y": 0.5487465181058496
}
],
"name": "optimal_zone_region"
},
"fairZoneRegion": {
"type": "POLYGON",
"points": [
{
"x": 0.7871674491392802,
"y": 0.7437325905292479
},
{
"x": 0.22065727699530516,
"y": 0.7325905292479109
}
],
"name": "fair_zone_region"
},
"uniformlySpacedPersonBoundingBoxes": [
{
"type": "RECTANGLE",
"points": [
{
"x": 0.0297339593114241,
"y": 0.0807799442896936
},
{
"x": 0.10015649452269171,
"y": 0.2757660167130919
}
]
}
],
"personBoundingBoxGroundPoints": [
{
"x": -22.944068908691406,
"y": 31.487680435180664
}
]
}
}
请参阅空间分析操作输出详细了解 source_info。
| ZonePlacementInfo 字段名称 | 类型 | 说明 |
|---|---|---|
optimalZonePolygon |
object | 相机图像中的多边形,可在其中放置操作线或区域以获得最佳结果。 每个值对表示多边形顶点的 x、y。 多边形表示跟踪或统计其中人数的区域,多边形点基于标准化坐标 (0-1),其中左上角为 (0.0, 0.0),右下角为 (1.0, 1.0)。 |
fairZonePolygon |
object | 相机图像中的多边形,可在其中放置操作线或区域,以获得良好但可能并非最佳的结果。 请参阅上面的 optimalZonePolygon 以深入了解其内容。 |
uniformlySpacedPersonBoundingBoxes |
list | 相机图像中在真实空间中均匀分布的人员的边框列表。 值基于规范化坐标 (0-1)。 |
personBoundingBoxGroundPoints |
list | 地板平面上相对于相机的坐标列表。 每个坐标对应于 uniformlySpacedPersonBoundingBoxes 中具有相同索引的边框的右下角。 请参阅 cognitiveservices.vision.spatialanalysis-persondistance AI 见解的 JSON 格式部分下的 centerGroundPointX/centerGroundPointY 字段,以详细了解如何计算地平面上的坐标。 |
视频帧上可视化的区域放置信息输出示例: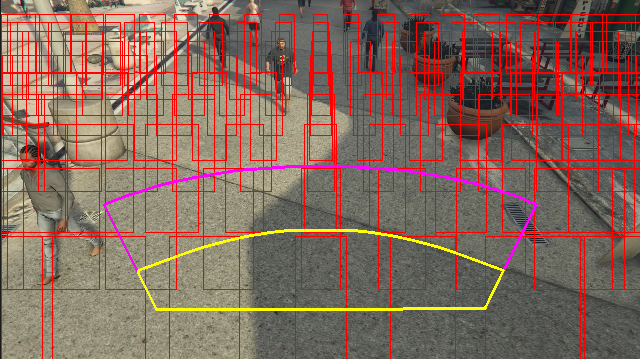
区域放置信息提供配置建议,但为了获得最佳结果,仍必须遵循相机配置中的准则。
跟踪器节点参数设置
可以通过跟踪器节点参数设置来配置速度计算。
{
"enable_speed": true,
"remove_stationary_objects": true,
"stationary_objects_dist_threshold_in_pixels": 5,
"stationary_objects_buffer_length_in_seconds": 3600,
"stationary_objects_filter_ratio": 0.2
}
| 名称 | Type | 描述 |
|---|---|---|
enable_speed |
bool | 指示是否要计算检测到的人物的速度。
enable_speed 默认设置为 True。 强烈建议同时启用速度和方向,以获得最佳估计值。 |
remove_stationary_objects |
bool | 指示是否要删除静止对象。 默认情况下,remove_stationary_objects 设置为 True。 |
stationary_objects_dist_threshold_in_pixels |
int | 用于决定是否可以将两个检测框视为相同检测的邻近距离阈值。 默认情况下,stationary_objects_dist_threshold_in_pixels 设置为 5。 |
stationary_objects_buffer_length_in_seconds |
int | 系统必须回顾以确定目标是否为静止目标的最小时间长度(以秒为单位)。 默认情况下,stationary_objects_buffer_length_in_seconds 设置为 3600。 |
stationary_objects_filter_ratio |
FLOAT | 如果在同一位置重复检测一个目标(在 stationary_objects_dist_threshold_in_pixels 中定义)超过 stationary_objects_buffer_length_in_seconds 时间间隔的 stationary_objects_filter_ratio(0.2 表示 20%),则将此目标视为静止目标。 默认情况下,stationary_objects_filter_ratio 设置为 0.2。 |
空间分析操作配置和输出
personcount 的区域配置
下面是一个配置区域的 SPACEANALYTICS_CONFIG 参数的 JSON 输入示例。 你可以为此操作配置多个区域。
{
"zones": [
{
"name": "lobbycamera",
"polygon": [[0.3,0.3], [0.3,0.9], [0.6,0.9], [0.6,0.3], [0.3,0.3]],
"events": [
{
"type": "count",
"config": {
"trigger": "event",
"focus": "footprint"
}
}
]
}
]
}
| 名称 | Type | 说明 |
|---|---|---|
zones |
list | 区域列表。 |
name |
string | 此区域的友好名称。 |
polygon |
list | 每个值对表示多边形顶点的 x、y。 多边形表示跟踪或统计其中人数的区域。 多边形点基于标准化坐标 (0-1),其中左上角为 (0.0,0.0),右下角为 (1.0,1.0)。 |
threshold |
FLOAT | 当人员在区域内的像素数大于此像素数时,将发出事件。 这是一个可选字段,其值以比率 (0-1) 表示。 例如,值 0.0253 表示图像宽度为 512 的视频上的 13 个像素 (0.0253 X 512 = ~13)。 |
type |
string | 对于 cognitiveservices.vision.spatialanalysis-personcount,此值应为 count。 |
trigger |
string | 发送事件的触发器的类型。 在计数发生更改时,支持的值为 event,表示发送事件;或者为 interval,表示定期发送事件,而不考虑计数是否发生更改。 |
output_frequency |
int | 发出事件的比率。 当 output_frequency = X 时,表示每 X 个事件发出一次,例如
output_frequency = 2,表示每隔一个事件输出一次。
output_frequency 适用于 event 和 interval。 |
focus |
string | 人员边界框内的点位置用于计算事件数。 焦点的值可以是 footprint(人员足迹)、bottom_center(人员边界框的底部中心)、center(人员边界框的中心)。 |
personcrossingline 的行配置
下面是配置行的 SPACEANALYTICS_CONFIG 参数的 JSON 输入示例。 你可以为此操作配置多条交叉线。
{
"lines": [
{
"name": "doorcamera",
"line": {
"start": {
"x": 0,
"y": 0.5
},
"end": {
"x": 1,
"y": 0.5
}
},
"events": [
{
"type": "linecrossing",
"config": {
"trigger": "event",
"focus": "footprint"
}
}
]
}
]
}
| 名称 | Type | 说明 |
|---|---|---|
lines |
list | 线列表。 |
name |
string | 此线的友好名称。 |
line |
list | 线的定义。 这是一条方向线,让你可了解“进入”与“离开”。 |
start |
值对 | 线条起点的 x、y 坐标。 浮点值表示顶点相对于左上角的位置。 要计算 x、y 的绝对值,可以用这些值乘以帧大小。 |
end |
值对 | 线条终结点的 x、y 坐标。 浮点值表示顶点相对于左上角的位置。 要计算 x、y 的绝对值,可以用这些值乘以帧大小。 |
threshold |
FLOAT | 当人员在区域内的像素数大于此像素数时,将发出事件。 这是一个可选字段,其值以比率 (0-1) 表示。 例如,值 0.0253 表示图像宽度为 512 的视频上的 13 个像素 (0.0253 X 512 = ~13)。 |
type |
string | 对于 cognitiveservices.vision.spatialanalysis-personcrossingline,此值应为 linecrossing。 |
trigger |
string | 发送事件的触发器的类型。 支持的值:“事件”:当有人越线时触发。 |
focus |
string | 人员边界框内的点位置用于计算事件数。 焦点的值可以是 footprint(人员足迹)、bottom_center(人员边界框的底部中心)、center(人员边界框的中心)。 默认值为 footprint。 |
personcrossingpolygon 的区域配置
下面是一个配置区域的 SPACEANALYTICS_CONFIG 参数的 JSON 输入示例。 你可以为此操作配置多个区域。
{
"zones":[
{
"name": "queuecamera",
"polygon": [[0.3,0.3], [0.3,0.9], [0.6,0.9], [0.6,0.3], [0.3,0.3]],
"events":[{
"type": "zonecrossing",
"config":{
"trigger": "event",
"focus": "footprint"
}
}]
},
{
"name": "queuecamera1",
"polygon": [[0.3,0.3], [0.3,0.9], [0.6,0.9], [0.6,0.3], [0.3,0.3]],
"events":[{
"type": "zonedwelltime",
"config":{
"trigger": "event",
"focus": "footprint"
}
}]
}]
}
| 名称 | Type | 说明 |
|---|---|---|
zones |
list | 区域列表。 |
name |
string | 此区域的友好名称。 |
polygon |
list | 每个值对表示多边形顶点的 x、y。 多边形表示跟踪或统计其中人数的区域。 浮点值表示顶点相对于左上角的位置。 要计算 x、y 的绝对值,可以用这些值乘以帧大小。 |
target_side |
int | 指定由 polygon 定义的区域的一侧,以测量人物在该区域中面向该侧的时长。 “dwellTimeForTargetSide”将输出该估计的时间。 每一侧都是表示区域的多边形两个顶点之间的编号边界。 例如,多边形前两个顶点之间的边表示第一侧,“side”=1。
target_side 的值介于 [0,N-1] 之间,其中 N 是 polygon 的边数。 这是一个可选字段。 |
threshold |
FLOAT | 当人员在区域内的像素数大于此像素数时,将发出事件。 这是一个可选字段,其值以比率 (0-1) 表示。 例如,值 0.074 表示图像宽度为 512 的视频上的 38 个像素 (0.074 X 512 = ~38)。 |
type |
string | 对于 cognitiveservices.vision.spatialanalysis-personcrossingpolygon,此值应为 zonecrossing 或 zonedwelltime。 |
trigger |
string | 发送事件的触发器的类型 支持的值:“事件”:有人进入或离开区域时触发。 |
focus |
string | 人员边界框内的点位置用于计算事件数。 焦点的值可以是 footprint(人员足迹)、bottom_center(人员边界框的底部中心)、center(人员边界框的中心)。 默认值为 footprint。 |
persondistance 的区域设置
下面是为 cognitiveservices.vision.spatialanalysis-persondistance 配置区域的 SPACEANALYTICS_CONFIG 参数的 JSON 输入示例。 你可以为此操作配置多个区域。
{
"zones":[{
"name": "lobbycamera",
"polygon": [[0.3,0.3], [0.3,0.9], [0.6,0.9], [0.6,0.3], [0.3,0.3]],
"events":[{
"type": "persondistance",
"config":{
"trigger": "event",
"output_frequency":1,
"minimum_distance_threshold":6.0,
"maximum_distance_threshold":35.0,
"aggregation_method": "average",
"focus": "footprint"
}
}]
}]
}
| 名称 | Type | 说明 |
|---|---|---|
zones |
list | 区域列表。 |
name |
string | 此区域的友好名称。 |
polygon |
list | 每个值对表示多边形顶点的 x、y。 多边形表示统计其中人数的区域,并度量人员之间的距离。 浮点值表示顶点相对于左上角的位置。 要计算 x、y 的绝对值,可以用这些值乘以帧大小。 |
threshold |
FLOAT | 当人员在区域内的像素数大于此像素数时,将发出事件。 这是一个可选字段,其值以比率 (0-1) 表示。 例如,值 0.0253 表示图像宽度为 512 的视频上的 13 个像素 (0.0253 X 512 = ~13)。 |
type |
string | 对于 cognitiveservices.vision.spatialanalysis-persondistance,此值应为 persondistance。 |
trigger |
string | 发送事件的触发器的类型。 在计数发生更改时,支持的值为 event,表示发送事件;或者为 interval,表示定期发送事件,而不考虑计数是否发生更改。 |
output_frequency |
int | 发出事件的比率。 当 output_frequency = X 时,表示每 X 个事件发出一次,例如
output_frequency = 2,表示每隔一个事件输出一次。
output_frequency 适用于 event 和 interval。 |
minimum_distance_threshold |
FLOAT | 以英尺为单位的距离,当人员之间小于该间距时,将触发“TooClose”事件。 |
maximum_distance_threshold |
FLOAT | 以英尺为单位的距离,当人员之间大于该间距时,将触发“TooFar”事件。 |
aggregation_method |
string | 用于聚合 persondistance 结果的方法。 aggregation_method 适用于 mode 和 average。 |
focus |
string | 人员边界框内的点位置用于计算事件数。 焦点的值可以是 footprint(人员足迹)、bottom_center(人员边界框的底部中心)、center(人员边界框的中心)。 |
spatialanalysis 的配置
下面是为 cognitiveservices.vision.spatialanalysis 配置线和区域的 SPACEANALYTICS_CONFIG 参数的 JSON 输入示例。 可为此操作配置多个线/区域,每个线/区域可以有不同的事件。
{
"lines": [
{
"name": "doorcamera",
"line": {
"start": {
"x": 0,
"y": 0.5
},
"end": {
"x": 1,
"y": 0.5
}
},
"events": [
{
"type": "linecrossing",
"config": {
"trigger": "event",
"focus": "footprint"
}
}
]
}
],
"zones": [
{
"name": "lobbycamera",
"polygon": [[0.3, 0.3],[0.3, 0.9],[0.6, 0.9],[0.6, 0.3],[0.3, 0.3]],
"events": [
{
"type": "persondistance",
"config": {
"trigger": "event",
"output_frequency": 1,
"minimum_distance_threshold": 6.0,
"maximum_distance_threshold": 35.0,
"focus": "footprint"
}
},
{
"type": "count",
"config": {
"trigger": "event",
"output_frequency": 1,
"focus": "footprint"
}
},
{
"type": "zonecrossing",
"config": {
"focus": "footprint"
}
},
{
"type": "zonedwelltime",
"config": {
"focus": "footprint"
}
}
]
}
]
}
相机配置
请参阅相机定位指导原则,详细了解如何配置区域和线。
空间分析操作输出
每个操作的事件都将以 JSON 格式发送到 Azure IoT 中心。
personcount AI Insights 的 JSON 格式
此操作输出事件的 JSON 示例。
{
"events": [
{
"id": "b013c2059577418caa826844223bb50b",
"type": "personCountEvent",
"detectionIds": [
"bc796b0fc2534bc59f13138af3dd7027",
"60add228e5274158897c135905b5a019"
],
"properties": {
"personCount": 2
},
"zone": "lobbycamera",
"trigger": "event"
}
],
"sourceInfo": {
"id": "camera_id",
"timestamp": "2020-08-24T06:06:57.224Z",
"width": 608,
"height": 342,
"frameId": "1400",
"cameraCalibrationInfo": {
"status": "Calibrated",
"cameraHeight": 10.306597709655762,
"focalLength": 385.3199462890625,
"tiltupAngle": 1.0969393253326416
},
"imagePath": ""
},
"detections": [
{
"type": "person",
"id": "bc796b0fc2534bc59f13138af3dd7027",
"region": {
"type": "RECTANGLE",
"points": [
{
"x": 0.612683747944079,
"y": 0.25340268765276636
},
{
"x": 0.7185954043739721,
"y": 0.6425260577285499
}
]
},
"confidence": 0.9559211134910583,
"metadata": {
"centerGroundPointX": "2.6310102939605713",
"centerGroundPointY": "0.0",
"groundOrientationAngle": "1.3",
"footprintX": "0.7306610584259033",
"footprintY": "0.8814966493381893"
},
"attributes": [
{
"label": "face_mask",
"confidence": 0.99,
"task": ""
}
]
},
{
"type": "person",
"id": "60add228e5274158897c135905b5a019",
"region": {
"type": "RECTANGLE",
"points": [
{
"x": 0.22326200886776573,
"y": 0.17830915618361087
},
{
"x": 0.34922296122500773,
"y": 0.6297955429344847
}
]
},
"confidence": 0.9389744400978088,
"metadata": {
"centerGroundPointX": "2.6310102939605713",
"centerGroundPointY": "18.635927200317383",
"groundOrientationAngle": "1.3",
"footprintX": "0.7306610584259033",
"footprintY": "0.8814966493381893"
},
"attributes": [
{
"label": "face_mask",
"confidence": 0.99,
"task": ""
}
]
}
],
"schemaVersion": "2.0"
}
| 事件字段名称 | 类型 | 说明 |
|---|---|---|
id |
string | 事件 ID |
type |
string | 事件类型 |
detectionsId |
array | 触发了此事件的人员检测的唯一标识符数组,大小为 1 |
properties |
collection | 值的集合 |
trackinId |
string | 检测到的人员的唯一标识符 |
zone |
string | 多边形的“名称”字段,多边形代表已越过区域 |
trigger |
string | 触发器类型为“事件”或“间隔”,具体取决于 SPACEANALYTICS_CONFIG 中 trigger 的值 |
| 检测字段名称 | 类型 | 说明 |
|---|---|---|
id |
string | 检测 ID |
type |
string | 检测类型 |
region |
collection | 值的集合 |
type |
string | 区域类型 |
points |
collection | 当区域类型为矩形时,表示左上角和右下角的点 |
confidence |
FLOAT | 算法置信度 |
attributes |
array | 属性的数组。 每个属性包括标签、任务和置信度 |
label |
string | 属性值(例如,{label: face_mask} 指示检测到的人佩戴着口罩) |
confidence (attribute) |
FLOAT | 0-1 范围内的属性置信度值(例如,{confidence: 0.9, label: face_nomask} 表示检测到的人员未佩戴口罩) |
task |
string | 属性分类任务/类 |
| SourceInfo 字段名称 | 类型 | 说明 |
|---|---|---|
id |
string | 相机 ID |
timestamp |
date | 发出 JSON 有效负载时的 UTC 日期 |
width |
int | 视频帧宽度 |
height |
int | 视频帧高度 |
frameId |
int | 帧标识符 |
cameraCallibrationInfo |
collection | 值的集合 |
status |
string | 校准的状态,格式为 state[;progress description]。 状态可以为 Calibrating、Recalibrating(如果已启用重新校准)或 Calibrated。 进度说明部分仅在处于 Calibrating 和 Recalibrating 状态时有效,后者用于显示当前校准过程的进度。 |
cameraHeight |
FLOAT | 相机高于地面的高度,以英尺为单位。 该信息根据自动校准推断而来。 |
focalLength |
FLOAT | 照相机的焦距,以像素为单位。 该信息根据自动校准推断而来。 |
tiltUpAngle |
FLOAT | 相机自垂直状态的倾斜角度。 该信息根据自动校准推断而来。 |
personcrossingline AI Insights 的 JSON 格式
此操作输出检测的 JSON 示例。
{
"events": [
{
"id": "3733eb36935e4d73800a9cf36185d5a2",
"type": "personLineEvent",
"detectionIds": [
"90d55bfc64c54bfd98226697ad8445ca"
],
"properties": {
"trackingId": "90d55bfc64c54bfd98226697ad8445ca",
"status": "CrossLeft"
},
"zone": "doorcamera"
}
],
"sourceInfo": {
"id": "camera_id",
"timestamp": "2020-08-24T06:06:53.261Z",
"width": 608,
"height": 342,
"frameId": "1340",
"imagePath": ""
},
"detections": [
{
"type": "person",
"id": "90d55bfc64c54bfd98226697ad8445ca",
"region": {
"type": "RECTANGLE",
"points": [
{
"x": 0.491627341822574,
"y": 0.2385801348769874
},
{
"x": 0.588894994635331,
"y": 0.6395559924387793
}
]
},
"confidence": 0.9005028605461121,
"metadata": {
"centerGroundPointX": "2.6310102939605713",
"centerGroundPointY": "18.635927200317383",
"groundOrientationAngle": "1.3",
"trackingId": "90d55bfc64c54bfd98226697ad8445ca",
"speed": "1.2",
"footprintX": "0.7306610584259033",
"footprintY": "0.8814966493381893"
},
"attributes": [
{
"label": "face_mask",
"confidence": 0.99,
"task": ""
}
]
}
],
"schemaVersion": "2.0"
}
| 事件字段名称 | 类型 | 说明 |
|---|---|---|
id |
string | 事件 ID |
type |
string | 事件类型 |
detectionsId |
array | 触发了此事件的人员检测的唯一标识符数组,大小为 1 |
properties |
collection | 值的集合 |
trackinId |
string | 检测到的人员的唯一标识符 |
status |
string | 越线方向:“CrossLeft”或“CrossRight”。 方向是基于站在线的“起点”朝向“终点”的想象得出的。 CrossRight 表示从左侧跨越到右侧。 CrossLeft 表示从右侧跨越到左侧。 |
orientationDirection |
字符串 | 检测到的人物在跨过线后的方向。 此值可以是 "Left"、"Right" 或 "Straight"。 如果在 CAMERACALIBRATOR_NODE_CONFIG 中将 enable_orientation 设置为 True,则此值为输出 |
zone |
字符串 | 跨越线的“名称”字段 |
| 检测字段名称 | 类型 | 说明 |
|---|---|---|
id |
string | 检测 ID |
type |
string | 检测类型 |
region |
collection | 值的集合 |
type |
string | 区域类型 |
points |
collection | 当区域类型为矩形时,表示左上角和右下角的点 |
groundOrientationAngle |
FLOAT | 人物的方向在推理的地面上的顺时针弧度角度 |
mappedImageOrientation |
FLOAT | 人物的方向在 2D 图像空间上的顺时针弧度角度 |
speed |
FLOAT | 检测到的人物的估计速度。 单位为 foot per second (ft/s) |
confidence |
FLOAT | 算法置信度 |
attributes |
array | 属性的数组。 每个属性包括标签、任务和置信度 |
label |
string | 属性值(例如,{label: face_mask} 指示检测到的人佩戴着口罩) |
confidence (attribute) |
FLOAT | 0-1 范围内的属性置信度值(例如,{confidence: 0.9, label: face_nomask} 表示检测到的人员未佩戴口罩) |
task |
string | 属性分类任务/类 |
| SourceInfo 字段名称 | 类型 | 说明 |
|---|---|---|
id |
string | 相机 ID |
timestamp |
date | 发出 JSON 有效负载时的 UTC 日期 |
width |
int | 视频帧宽度 |
height |
int | 视频帧高度 |
frameId |
int | 帧标识符 |
重要
AI 模型可检测人员,不考虑人员是面向还是远离照相机。 AI 模型不会运行面部识别,也不会发出任何生物识别信息。
personcrossingpolygon AI Insights 的 JSON 格式
此操作使用 zonecrossing 类型 SPACEANALYTICS_CONFIG 输出检测的 JSON 示例。
{
"events": [
{
"id": "f095d6fe8cfb4ffaa8c934882fb257a5",
"type": "personZoneEnterExitEvent",
"detectionIds": [
"afcc2e2a32a6480288e24381f9c5d00e"
],
"properties": {
"trackingId": "afcc2e2a32a6480288e24381f9c5d00e",
"status": "Enter",
"side": "1"
},
"zone": "queuecamera"
}
],
"sourceInfo": {
"id": "camera_id",
"timestamp": "2020-08-24T06:15:09.680Z",
"width": 608,
"height": 342,
"frameId": "428",
"imagePath": ""
},
"detections": [
{
"type": "person",
"id": "afcc2e2a32a6480288e24381f9c5d00e",
"region": {
"type": "RECTANGLE",
"points": [
{
"x": 0.8135572734631991,
"y": 0.6653949670624315
},
{
"x": 0.9937645761590255,
"y": 0.9925406829655519
}
]
},
"confidence": 0.6267998814582825,
"metadata": {
"centerGroundPointX": "2.6310102939605713",
"centerGroundPointY": "18.635927200317383",
"groundOrientationAngle": "1.3",
"trackingId": "afcc2e2a32a6480288e24381f9c5d00e",
"speed": "1.2",
"footprintX": "0.7306610584259033",
"footprintY": "0.8814966493381893"
},
"attributes": [
{
"label": "face_mask",
"confidence": 0.99,
"task": ""
}
]
}
],
"schemaVersion": "2.0"
}
此操作使用 zonedwelltime 类型 SPACEANALYTICS_CONFIG 输出检测的 JSON 示例。
{
"events": [
{
"id": "f095d6fe8cfb4ffaa8c934882fb257a5",
"type": "personZoneDwellTimeEvent",
"detectionIds": [
"afcc2e2a32a6480288e24381f9c5d00e"
],
"properties": {
"trackingId": "afcc2e2a32a6480288e24381f9c5d00e",
"status": "Exit",
"side": "1",
"dwellTime": 7132.0,
"dwellFrames": 20
},
"zone": "queuecamera"
}
],
"sourceInfo": {
"id": "camera_id",
"timestamp": "2020-08-24T06:15:09.680Z",
"width": 608,
"height": 342,
"frameId": "428",
"imagePath": ""
},
"detections": [
{
"type": "person",
"id": "afcc2e2a32a6480288e24381f9c5d00e",
"region": {
"type": "RECTANGLE",
"points": [
{
"x": 0.8135572734631991,
"y": 0.6653949670624315
},
{
"x": 0.9937645761590255,
"y": 0.9925406829655519
}
]
},
"confidence": 0.6267998814582825,
"metadata": {
"centerGroundPointX": "2.6310102939605713",
"centerGroundPointY": "18.635927200317383",
"groundOrientationAngle": "1.2",
"mappedImageOrientation": "0.3",
"speed": "1.2",
"trackingId": "afcc2e2a32a6480288e24381f9c5d00e",
"footprintX": "0.7306610584259033",
"footprintY": "0.8814966493381893"
}
}
],
"schemaVersion": "2.0"
}
| 事件字段名称 | 类型 | 说明 |
|---|---|---|
id |
string | 事件 ID |
type |
string | 事件类型。 该值可以是 personZoneDwellTimeEvent 或 personZoneEnterExitEvent |
detectionsId |
array | 触发了此事件的人员检测的唯一标识符数组,大小为 1 |
properties |
collection | 值的集合 |
trackinId |
string | 检测到的人员的唯一标识符 |
status |
string | 越过多边形的方向:“进入”或“离开” |
side |
int | 人员所跨过的多边形的边号。 每一侧都是表示区域的多边形两个顶点之间的编号边界。 多边形前两个顶点之间的边表示第一侧。 当事件由于遮挡而不与特定一侧关联时,“Side”为空。 例如,当某人消失,但未看到他(她)跨越区域的一侧时,则表示发生了离开事件;当某个出现在区域中,但未看到他(她)跨越一侧时,则表示发生了进入事件。 |
dwellTime |
FLOAT | 表示人员在区域中停留时间的毫秒数。 当事件类型为 personZoneDwellTimeEvent 时,提供此字段 |
dwellFrames |
int | 人物在该区域中停留的帧数。 当事件类型为 personZoneDwellTimeEvent 时,提供此字段 |
dwellTimeForTargetSide |
FLOAT | 表示人物在该区域中停留且面向 target_side 的时间的毫秒数。 当 CAMERACALIBRATOR_NODE_CONFIG 中的 enable_orientation 为 True,并且在 SPACEANALYTICS_CONFIG 中设置了 target_side 的值时,将提供此字段 |
avgSpeed |
FLOAT | 人物在该区域中的平均速度。 单位为 foot per second (ft/s) |
minSpeed |
FLOAT | 人物在该区域中的最低速度。 单位为 foot per second (ft/s) |
zone |
字符串 | 多边形的“名称”字段,多边形代表已越过区域 |
| 检测字段名称 | 类型 | 说明 |
|---|---|---|
id |
string | 检测 ID |
type |
string | 检测类型 |
region |
collection | 值的集合 |
type |
string | 区域类型 |
points |
collection | 当区域类型为矩形时,表示左上角和右下角的点 |
groundOrientationAngle |
FLOAT | 人物的方向在推理的地面上的顺时针弧度角度 |
mappedImageOrientation |
FLOAT | 人物的方向在 2D 图像空间上的顺时针弧度角度 |
speed |
FLOAT | 检测到的人物的估计速度。 单位为 foot per second (ft/s) |
confidence |
FLOAT | 算法置信度 |
attributes |
array | 属性的数组。 每个属性包括标签、任务和置信度 |
label |
string | 属性值(例如,{label: face_mask} 指示检测到的人佩戴着口罩) |
confidence (attribute) |
FLOAT | 0-1 范围内的属性置信度值(例如,{confidence: 0.9, label: face_nomask} 表示检测到的人员未佩戴口罩) |
task |
string | 属性分类任务/类 |
persondistance AI Insights 的 JSON 格式
此操作输出检测的 JSON 示例。
{
"events": [
{
"id": "9c15619926ef417aa93c1faf00717d36",
"type": "personDistanceEvent",
"detectionIds": [
"9037c65fa3b74070869ee5110fcd23ca",
"7ad7f43fd1a64971ae1a30dbeeffc38a"
],
"properties": {
"personCount": 5,
"averageDistance": 20.807043981552123,
"minimumDistanceThreshold": 6.0,
"maximumDistanceThreshold": "Infinity",
"eventName": "TooClose",
"distanceViolationPersonCount": 2
},
"zone": "lobbycamera",
"trigger": "event"
}
],
"sourceInfo": {
"id": "camera_id",
"timestamp": "2020-08-24T06:17:25.309Z",
"width": 608,
"height": 342,
"frameId": "1199",
"cameraCalibrationInfo": {
"status": "Calibrated",
"cameraHeight": 12.9940824508667,
"focalLength": 401.2800598144531,
"tiltupAngle": 1.057669997215271
},
"imagePath": ""
},
"detections": [
{
"type": "person",
"id": "9037c65fa3b74070869ee5110fcd23ca",
"region": {
"type": "RECTANGLE",
"points": [
{
"x": 0.39988183975219727,
"y": 0.2719132942065858
},
{
"x": 0.5051516984638414,
"y": 0.6488402517218339
}
]
},
"confidence": 0.948630690574646,
"metadata": {
"centerGroundPointX": "-1.4638760089874268",
"centerGroundPointY": "18.29732322692871",
"groundOrientationAngle": "1.3",
"footprintX": "0.7306610584259033",
"footprintY": "0.8814966493381893"
}
},
{
"type": "person",
"id": "7ad7f43fd1a64971ae1a30dbeeffc38a",
"region": {
"type": "RECTANGLE",
"points": [
{
"x": 0.5200299714740954,
"y": 0.2875368218672903
},
{
"x": 0.6457497446160567,
"y": 0.6183311060855263
}
]
},
"confidence": 0.8235412240028381,
"metadata": {
"centerGroundPointX": "2.6310102939605713",
"centerGroundPointY": "18.635927200317383",
"groundOrientationAngle": "1.3",
"footprintX": "0.7306610584259033",
"footprintY": "0.8814966493381893"
}
}
],
"schemaVersion": "2.0"
}
| 事件字段名称 | 类型 | 说明 |
|---|---|---|
id |
string | 事件 ID |
type |
string | 事件类型 |
detectionsId |
array | 触发了此事件的人员检测的唯一标识符数组,大小为 1 |
properties |
collection | 值的集合 |
personCount |
int | 发出事件时检测到的人员数 |
averageDistance |
FLOAT | 检测到的所有人员之间的平均距离,以英尺为单位 |
minimumDistanceThreshold |
FLOAT | 以英尺为单位的距离,当人员之间小于该间距时,将触发“TooClose”事件。 |
maximumDistanceThreshold |
FLOAT | 以英尺为单位的距离,当人员之间大于该间距时,将触发“TooFar”事件。 |
eventName |
string | 违反 minimumDistanceThreshold 时事件名称为 TooClose;违反 maximumDistanceThreshold 时事件名称为 TooFar;自动校准尚未完成时事件名称为 unknown |
distanceViolationPersonCount |
int | 违反 minimumDistanceThreshold 或 maximumDistanceThreshold 时检测到的人员数 |
zone |
string | 多边形的“名称”字段,多边形表示监控人员之间距离的区域 |
trigger |
string | 触发器类型为“事件”或“间隔”,具体取决于 SPACEANALYTICS_CONFIG 中 trigger 的值 |
| 检测字段名称 | 类型 | 说明 |
|---|---|---|
id |
string | 检测 ID |
type |
string | 检测类型 |
region |
collection | 值的集合 |
type |
string | 区域类型 |
points |
collection | 当区域类型为矩形时,表示左上角和右下角的点 |
confidence |
FLOAT | 算法置信度 |
centerGroundPointX/centerGroundPointY |
2 个 float 值 |
x、y 值,包含推断的人员在地面上位置(以英尺为单位)的坐标。
x 和 y 是地平面上的坐标,假设地面为水平。 照相机的位置为原点。 |
在 centerGroundPoint 中,x 是从相机到与相机图像平面垂直的人员之间的距离的组成部分。
y 是平行于相机图像平面的距离的组成部分。
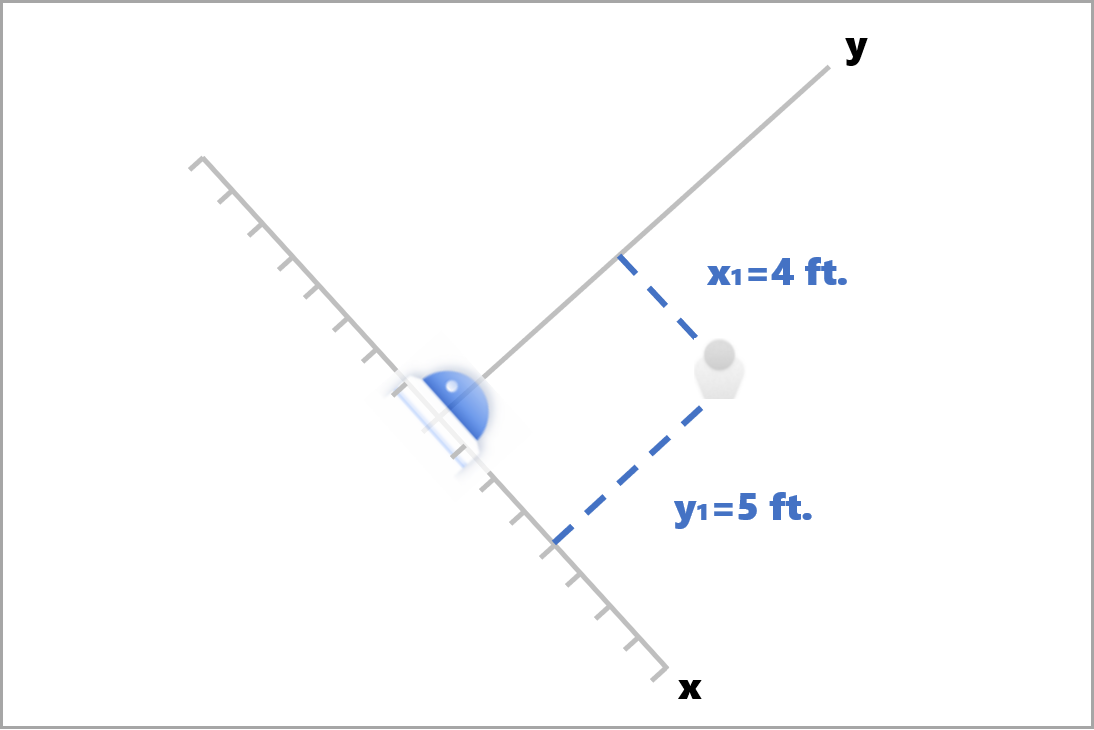
在本示例中,centerGroundPoint 状态为 {centerGroundPointX: 4, centerGroundPointY: 5}。 这表示,有一个人在距离相机 4 英尺、距离右侧 5 英尺的位置从上向下查看房间。
| SourceInfo 字段名称 | 类型 | 说明 |
|---|---|---|
id |
string | 相机 ID |
timestamp |
date | 发出 JSON 有效负载时的 UTC 日期 |
width |
int | 视频帧宽度 |
height |
int | 视频帧高度 |
frameId |
int | 帧标识符 |
cameraCallibrationInfo |
collection | 值的集合 |
status |
string | 校准的状态,格式为 state[;progress description]。 状态可以为 Calibrating、Recalibrating(如果已启用重新校准)或 Calibrated。 进度说明部分仅在处于 Calibrating 和 Recalibrating 状态时有效,后者用于显示当前校准过程的进度。 |
cameraHeight |
FLOAT | 相机高于地面的高度,以英尺为单位。 该信息根据自动校准推断而来。 |
focalLength |
FLOAT | 照相机的焦距,以像素为单位。 该信息根据自动校准推断而来。 |
tiltUpAngle |
FLOAT | 相机自垂直状态的倾斜角度。 该信息根据自动校准推断而来。 |
spatialanalysis AI Insights 的 JSON 格式
此操作的输出取决于配置的 events,例如,如果为此操作配置了 zonecrossing 事件,则输出将与 cognitiveservices.vision.spatialanalysis-personcrossingpolygon 相同。
使用容器生成的输出
你可能想要将空间分析检测或事件集成到应用程序中。 下面这些想法值得考虑:
- 使用适用于所选编程语言的 Azure 事件中心 SDK 连接到 Azure IoT 中心终结点,并接收事件。 有关详细信息,请参阅从内置终结点读取设备到云的消息。
- 在 Azure IoT 中心设置“消息路由”,以将事件发送到其他终结点,或者将事件保存到数据存储。 有关详细信息,请参阅 IoT 中心消息路由。
- 设置 Azure 流分析作业,从而在事件到达时实时处理事件,并创建可视化效果。
大规模部署空间分析操作(多个相机)
为了获得最佳性能和充分利用 GPU,可以使用图形实例在多个相机上部署任何空间分析操作。 下面是在 15 个相机上运行 cognitiveservices.vision.spatialanalysis-personcrossingline 操作的示例配置。
"properties.desired": {
"globalSettings": {
"PlatformTelemetryEnabled": false,
"CustomerTelemetryEnabled": true
},
"graphs": {
"personzonelinecrossing": {
"operationId": "cognitiveservices.vision.spatialanalysis-personcrossingline",
"version": 1,
"enabled": true,
"sharedNodes": {
"shared_detector0": {
"node": "PersonCrossingLineGraph.detector",
"parameters": {
"DETECTOR_NODE_CONFIG": "{ \"gpu_index\": 0, \"batch_size\": 7, \"do_calibration\": true}",
}
},
"shared_calibrator0": {
"node": "PersonCrossingLineGraph/cameracalibrator",
"parameters": {
"CAMERACALIBRATOR_NODE_CONFIG": "{ \"gpu_index\": 0, \"do_calibration\": true, \"enable_zone_placement\": true}",
"CALIBRATION_CONFIG": "{\"enable_recalibration\": true, \"quality_check_frequency_seconds\": 86400}",
}
},
"parameters": {
"VIDEO_DECODE_GPU_INDEX": 0,
"VIDEO_IS_LIVE": true
},
"instances": {
"1": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 1>",
"VIDEO_SOURCE_ID": "camera 1",
"SPACEANALYTICS_CONFIG": "{\"zones\":[{\"name\":\"queue\",\"polygon\":[[0,0],[1,0],[0,1],[1,1],[0,0]]}]}"
}
},
"2": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 2>",
"VIDEO_SOURCE_ID": "camera 2",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"3": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 3>",
"VIDEO_SOURCE_ID": "camera 3",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"4": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 4>",
"VIDEO_SOURCE_ID": "camera 4",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"5": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 5>",
"VIDEO_SOURCE_ID": "camera 5",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"6": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 6>",
"VIDEO_SOURCE_ID": "camera 6",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"7": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 7>",
"VIDEO_SOURCE_ID": "camera 7",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"8": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 8>",
"VIDEO_SOURCE_ID": "camera 8",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"9": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 9>",
"VIDEO_SOURCE_ID": "camera 9",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"10": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 10>",
"VIDEO_SOURCE_ID": "camera 10",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"11": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 11>",
"VIDEO_SOURCE_ID": "camera 11",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"12": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 12>",
"VIDEO_SOURCE_ID": "camera 12",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"13": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 13>",
"VIDEO_SOURCE_ID": "camera 13",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"14": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 14>",
"VIDEO_SOURCE_ID": "camera 14",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
},
"15": {
"sharedNodeMap": {
"PersonCrossingLineGraph/detector": "shared_detector0",
"PersonCrossingLineGraph/cameracalibrator": "shared_calibrator0",
},
"parameters": {
"VIDEO_URL": "<Replace RTSP URL for camera 15>",
"VIDEO_SOURCE_ID": "camera 15",
"SPACEANALYTICS_CONFIG": "<Replace the zone config value, same format as above>"
}
}
}
},
}
}
| 名称 | Type | 说明 |
|---|---|---|
batch_size |
int | 如果所有相机都具有相同的分辨率,则将 batch_size 设置为该操作中要使用的相机数,或者将 batch_size 设置为 1,或将其保留为默认值 (1),这表示不支持批处理。 |