你当前正在访问 Microsoft Azure Global Edition 技术文档网站。 如果需要访问由世纪互联运营的 Microsoft Azure 中国技术文档网站,请访问 https://docs.azure.cn。
空间分析相机放置
重要
2025 年 3 月 30 日,Azure AI 视觉空间分析将停用。 请在指定日期之前转换到 Azure AI 视频索引器或其他开放源代码解决方案。 我们建议你尽快进行切换,以获取 Azure AI 视频索引器更丰富的权益。 除了你正在使用的熟悉的功能之外,这里还对 Azure AI 视觉空间分析和 Azure AI 视频索引器进行了快速比较。
| 功能 | Azure AI 视觉空间分析 | Azure AI 视频索引器 |
|---|---|---|
| Edge 支持 | 是 | 是 |
| 对象检测 | 仅人员与车辆检测 | 检测 1000 多个对象 |
| 音频/语音处理 | 不支持 | 支持(包括语音听录、翻译和摘要) 支持 >(包括语音听录和情绪分析) |
| 事件检测和跟踪 | 支持(跟踪人员和车辆、事件检测) | 在 Edge 中尚不受支持。 在云中部分受支持。 |
| Azure Arc 支持 | 不支持 | 原生支持 |
| 关注的领域 | 使用专用跟踪进行可视化分析 | 全面分析音频和视频内容 |
从现在起至 2025 年 3 月 30 日,你可以继续使用 Azure AI 视觉空间分析,也可以在指定日期之前转换到 Azure AI 视频索引器。 2025 年 3 月 30 日之后,空间分析容器将不再受支持,将停止处理新流。
本文提供了用于空间分析(公共预览版)场景的相机放置建议。 其中包括一般指导原则,以及高度、角度和相机至焦点距离方面的,与全部所含操作相关的具体建议。
注意
本指南适用于 Axis M3045-V 相机。 此相机具有 1920x1080 分辨率、106 度水平视场、59 度垂直视场和固定的 2.8 毫米焦距。 以下原则适用于所有相机,不过,在对其他相机运用时,需要在相机高度和相机至焦点距离方面调整具体的指导原则。
一般指南
放置用于空间分析的相机时,请考虑以下一般指导原则:
- 照明高度:将相机放置在照明装置的下方,以免装置挡住相机。
- 障碍物:为了避免阻挡相机视场,请留意照相杆、招牌、架子、墙壁和现有的 LP 相机等障碍物。
- 环境背光:室外背光会影响相机图像质量。 为了避免出现严重的背光状况,请勿将相机对准通外的窗户和玻璃门。
- 当地隐私法规:当地法规可能会限制相机可以拍摄的内容。 在放置相机之前,请务必了解当地规则和法规。
- 建筑结构:HVAC(暖通空调)、灭火器和现有布线可能会限制相机的硬件安装。
- 电缆管理:确保能够将网线从规划好的相机安装位置连接到以太网供电 (PoE) 交换机。
高度、焦点距离和角度
在确定如何安装用于空间分析的相机时,你需要考虑三个点:
- 相机高度
- 相机至焦点的距离
- 相机相对于地平面的角度
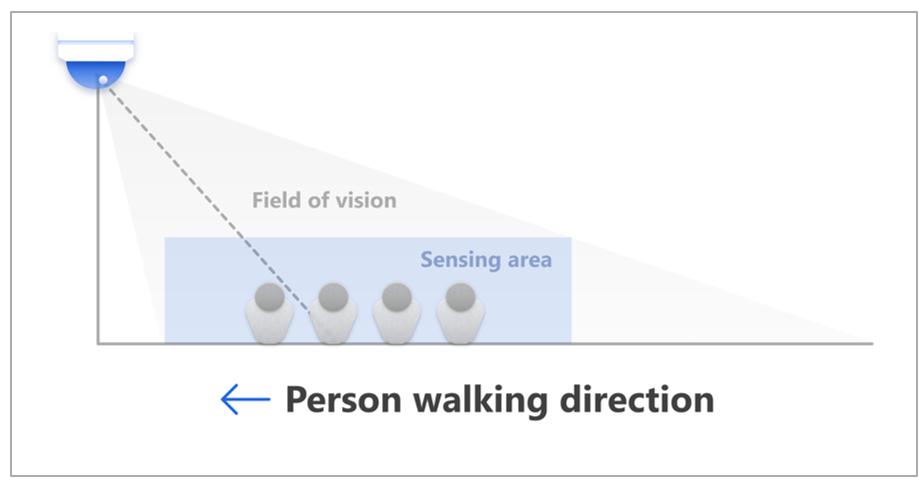
在可能的情况下,还需要知道大部分人相对于相机视场的行走方向(人员行走方向)。 此方向对于系统性能而言非常重要。
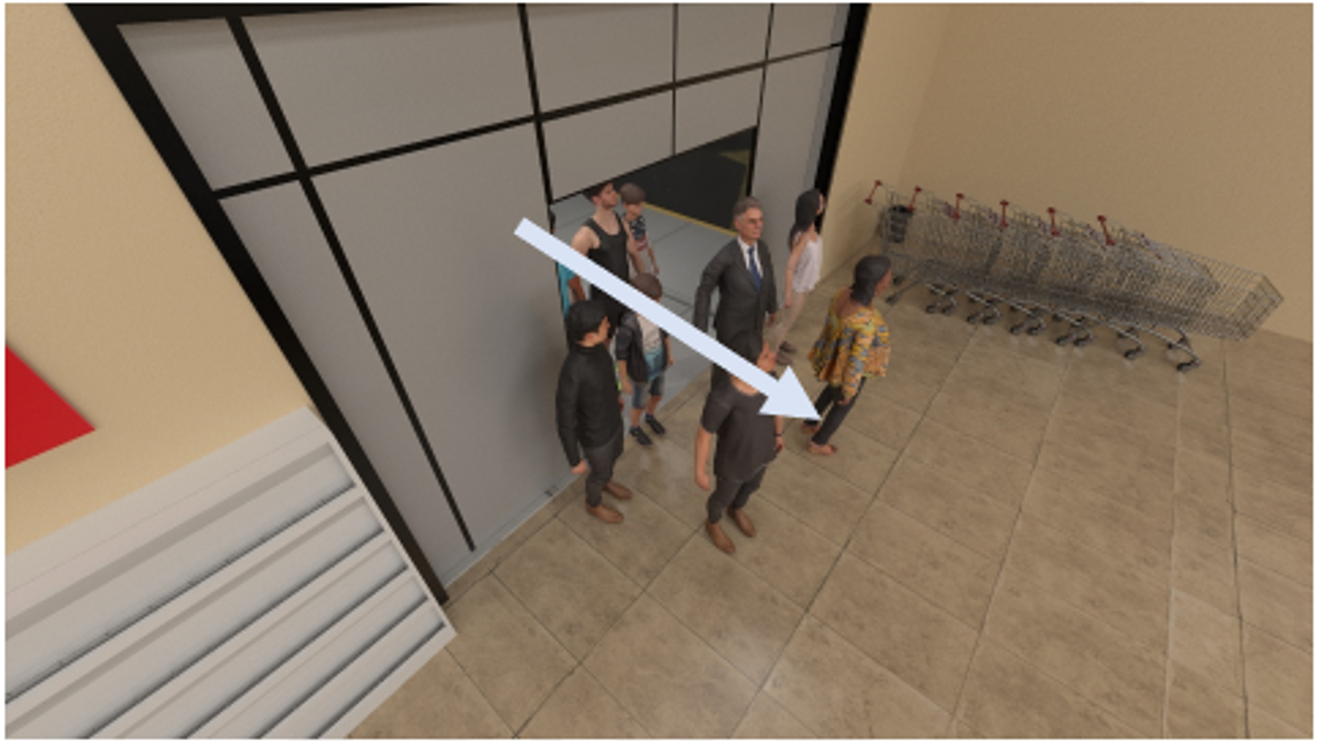
下图显示了人员行走方向的立视图。
相机高度
一般情况下,相机应安装在距离地面 12-14 英尺的位置。 要进行面罩检测,我们建议将相机安装在距离地面 8-12 英尺的位置。 在此范围内规划安装相机时,请考虑到可能影响相机视场的阻碍物(例如架子、吊灯、吊装招牌和显示器),然后根据需要调整高度。
相机至焦点的距离
相机至焦点的距离是从焦点(或相机图像中心)到相机的线性距离,在地面上测量。

此距离在地平面上测量。
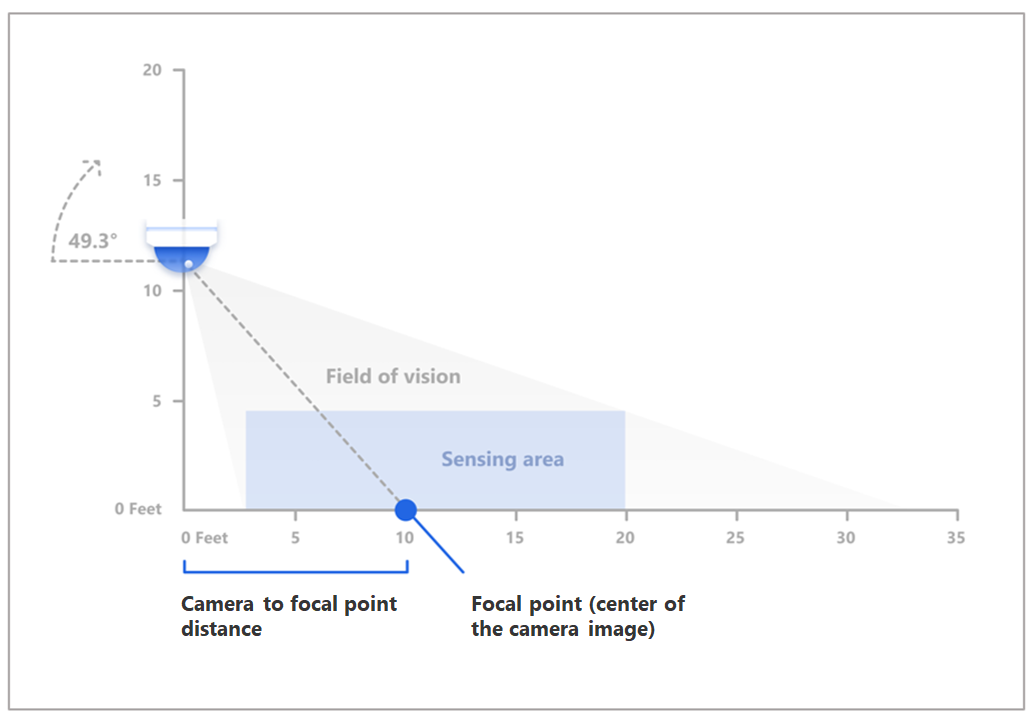
从上方来看,测量方式如下:
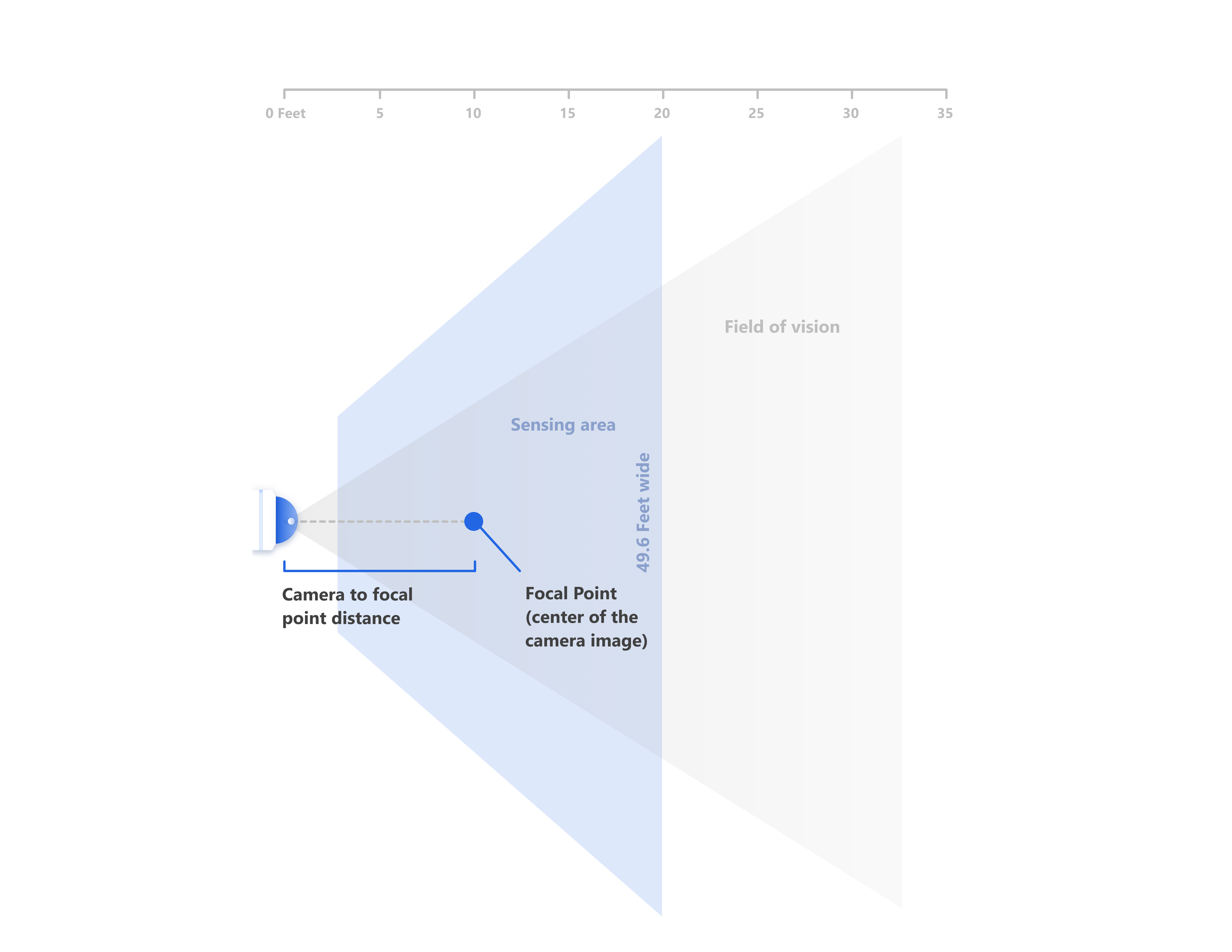
参考下表,以便根据特定的安装高度确定相机与焦点之间的距离。 参考这些距离可以实现最佳放置。 请注意,该表提供了针对 12-14 英尺以下的高度的指导建议,因为某些天花板可能会限制高度。 要进行面罩检测,在相机高度为 8-12 英尺的情况下,建议的相机至焦点距离(最小值/最大值)为 4-10 英尺。
| 相机高度 | 相机至焦点的距离(最小值/最大值) |
|---|---|
| 8 英尺 | 4.6-8 英尺 |
| 10 英尺 | 5.8-10 英尺 |
| 12 英尺 | 7-12 英尺 |
| 14 英尺 | 8-14 英尺 |
| 16 英尺 | 9.2-16 英尺 |
| 20 英尺 | 11.5-20 英尺 |
下图模拟了最近和最远相机至焦点距离的相机视场。
| 最近 | 最远 |
|---|---|
 |
 |
相机角度安装范围
本部分介绍可接受的相机角度安装范围。 这些安装范围展示了可接受的最佳放置范围。
视线配置
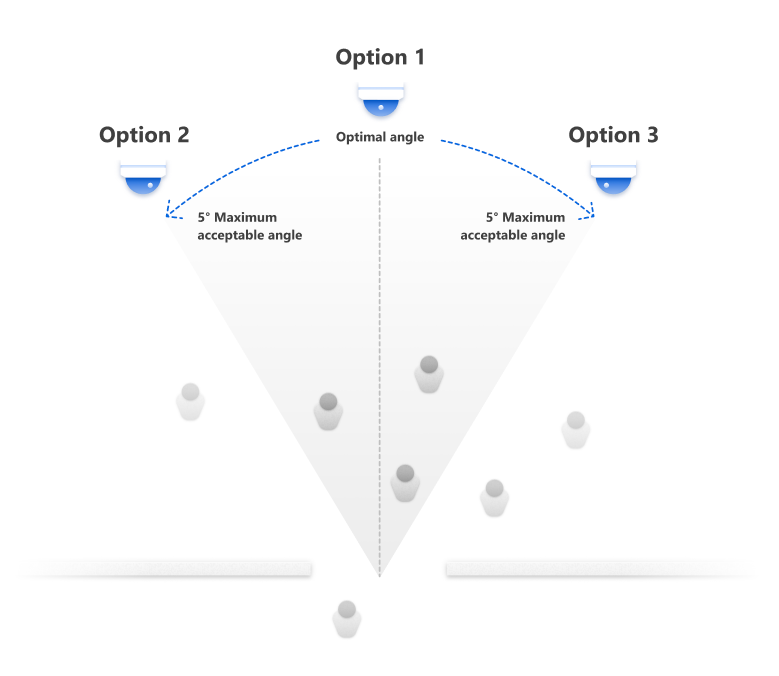
要进行 cognitiveservices.vision.spatialanalysis-personcrossingline 操作,+/-5 度是最佳的相机安装角度,这可以最大程度地提高准确度。
要进行面罩检测,在相机高度为 8-12 英尺的情况下,+/-30 度是最佳的相机安装角度。
下图模拟了按照最左侧 (-) 和最右侧 (+) 安装角度建议,使用 cognitiveservices account spatialanalysis-personcrossingline 在门口执行入室人数统计时的相机视场。
| 最左侧视场 | 最右侧视场 |
|---|---|
 |
 |
下图显示了相机放置和安装角度的鸟瞰图。
区域配置
建议将相机放置在距离地面 10 英尺或更高的位置,以保证覆盖足够大的区域。
如果区域位于墙壁或货架等障碍物的旁边,请将相机安装在与目标相距指定距离的位置,其可接受的角度范围为 120 度,如下图所示。
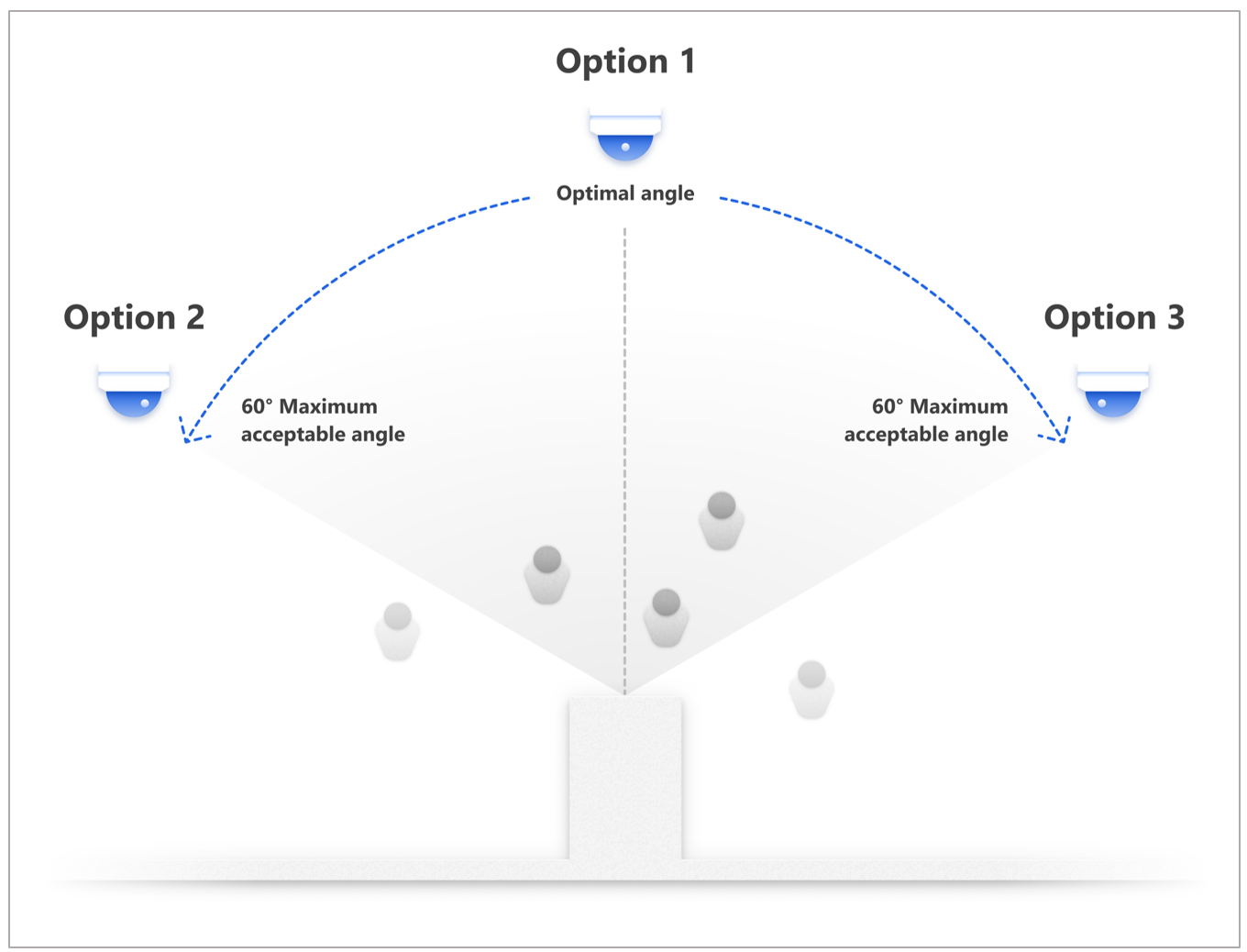
下图模拟了位于货架旁边的区域的左侧和右侧相机视场。
| 左侧视场 | 右侧视场 |
|---|---|
 |
 |
队列
可以使用 cognitiveservices.vision.spatialanalysis-personcount、cognitiveservices.vision.spatialanalysis-persondistance 和 cognitiveservices.vision.spatialanalysis-personcrossingpolygon 技能来监视队列。 为确保最佳的队列数据质量,最好是使用可回卷拉带栅栏来尽量减少人员在队列中的阻塞情况,确保队列位置在不同的时间都能保持一致。
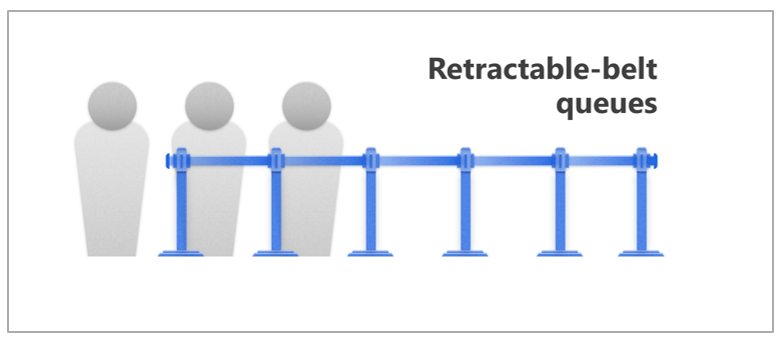
与不透明的栅栏相比,这种栅栏能够更好地保持队形,可以最大程度地提高系统的识别准确度。
有两种类型的队列:线性和之字形。
下图显示了有关线性队列的建议:
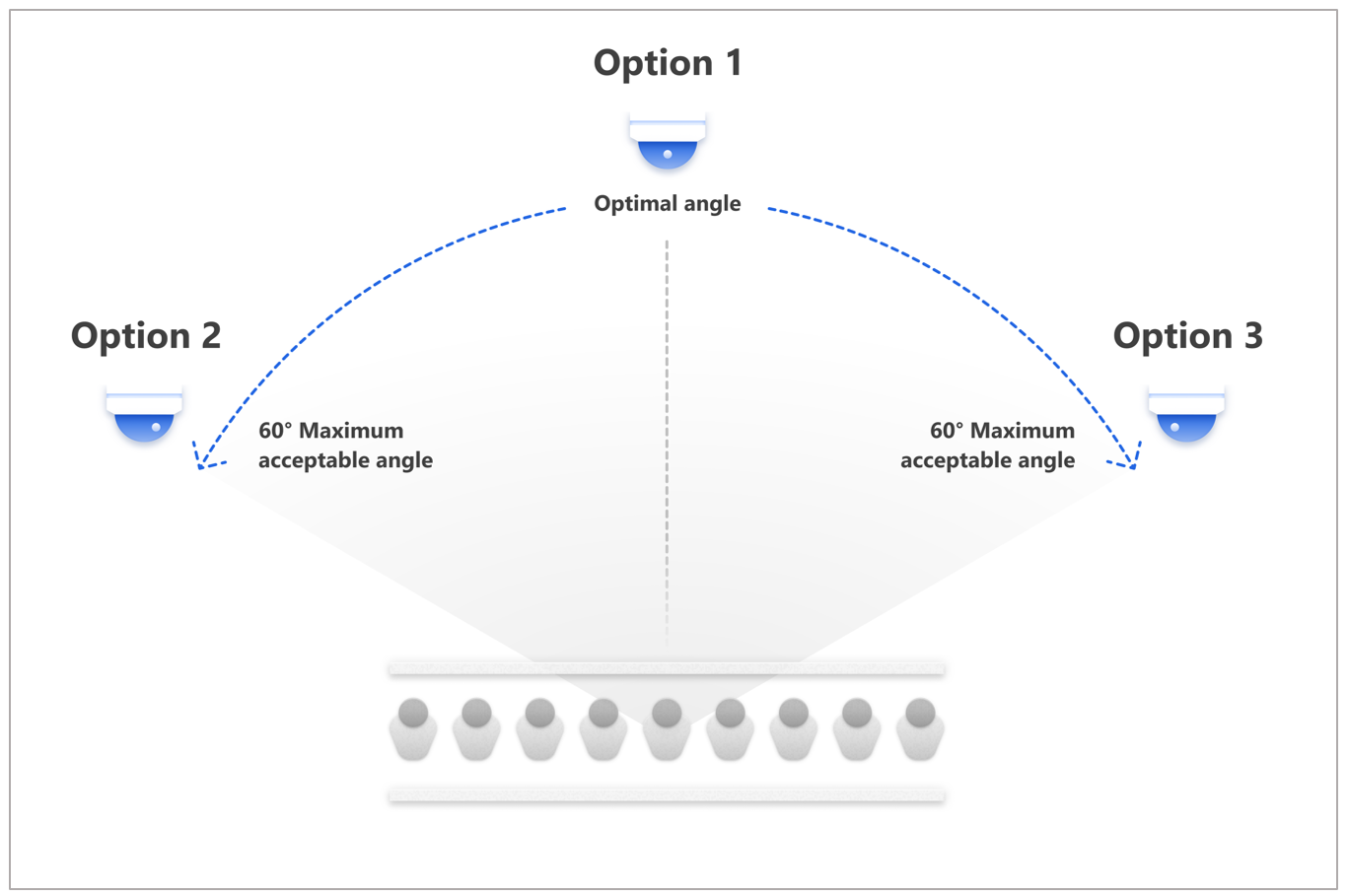
下图模拟了线性队列的左侧和右侧相机视场。 请注意,可将相机安装在队列的另一侧。
| 左侧视场 | 右侧视场 |
|---|---|
 |
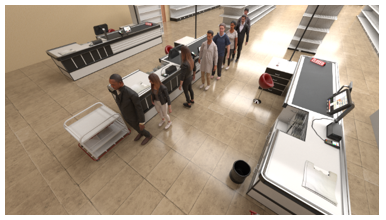 |
对于之字形队列,最好是避免将相机放置在直接朝向队形方向的位置,如下图所示。 请注意,插图中四个示例相机位置均提供了理想的视场,每个方向可接受 +/-15 度的偏差。
下图模拟了针对之字形队列将相机放置在理想位置时的视场。
| 视场 1 | 视场 2 |
|---|---|
 |
 |
| 视场 3 | 视场 4 |
|---|---|
 |
 |
有机队列
有机队列是自然形成的行列。 如果排队人数不超过 2-3 人,并且队形符合区域定义,则可以接受此队列样式。 如果队列长度通常大于 2-3 人,则我们建议使用可回卷拉带栅栏来帮助引导队列方向,并确保队形符合区域定义。