Преобразование мира (Direct3D 9)
В обсуждении трансформации мира представлены основные понятия и приводятся подробные сведения о том, как создать преобразование мира.
Что такое преобразование мира?
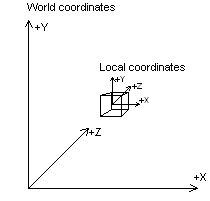
Преобразование мира изменяет координаты пространства модели, где вершины определяются относительно локального происхождения модели, в мировое пространство, где вершины определяются относительно источника, общего для всех объектов в сцене. По сути, мировое преобразование помещает модель в мир, — отсюда и название. На следующей схеме показана взаимосвязь между мировой системой координат и локальной системой координат модели.
Мировое преобразование может включать любое сочетание параллельных переносов, поворотов и масштабирований.
Установка мировой матрицы
Как и в случае с любыми другими преобразованиями, мировое преобразование создается путем с конкатенации ряда матриц в единую матрицу, которая содержит всю сумму их эффектов. В самом простом случае, когда модель находится в мировом начале координат и ее локальные координатные оси ориентированы так же, как мировое пространство, мировая матрица представляет собой единичную матрицу. Чаще, однако, мировая матрица представляет собой сочетание параллельного переноса в мировое пространство и, возможно, одного или нескольких поворотов для придания модели необходимой ориентации.
В следующем примере из вымышленного класса трехмерной модели, написанного на языке C++, используются вспомогательные функции, включенные в служебную библиотеку D3DX, для создания матрицы мира, которая включает три поворота для ориентации модели и перевод для перемещения ее относительно ее положения в мировом пространстве.
/*
* For the purposes of this example, the following variables
* are assumed to be valid and initialized.
*
* The m_xPos, m_yPos, m_zPos variables contain the model's
* location in world coordinates.
*
* The m_fPitch, m_fYaw, and m_fRoll variables are floats that
* contain the model's orientation in terms of pitch, yaw, and roll
* angles, in radians.
*/
void C3DModel::MakeWorldMatrix( D3DXMATRIX* pMatWorld )
{
D3DXMATRIX MatTemp; // Temp matrix for rotations.
D3DXMATRIX MatRot; // Final rotation matrix, applied to
// pMatWorld.
// Using the left-to-right order of matrix concatenation,
// apply the translation to the object's world position
// before applying the rotations.
D3DXMatrixTranslation(pMatWorld, m_xPos, m_yPos, m_zPos);
D3DXMatrixIdentity(&MatRot);
// Now, apply the orientation variables to the world matrix
if(m_fPitch || m_fYaw || m_fRoll) {
// Produce and combine the rotation matrices.
D3DXMatrixRotationX(&MatTemp, m_fPitch); // Pitch
D3DXMatrixMultiply(&MatRot, &MatRot, &MatTemp);
D3DXMatrixRotationY(&MatTemp, m_fYaw); // Yaw
D3DXMatrixMultiply(&MatRot, &MatRot, &MatTemp);
D3DXMatrixRotationZ(&MatTemp, m_fRoll); // Roll
D3DXMatrixMultiply(&MatRot, &MatRot, &MatTemp);
// Apply the rotation matrices to complete the world matrix.
D3DXMatrixMultiply(pMatWorld, &MatRot, pMatWorld);
}
}
После подготовки матрицы мира вызовите метод IDirect3Device9::SetTransform , чтобы задать ее, указав макрос D3DTS_WORLD для первого параметра.
Примечание
Direct3D использует установленные вами мировую матрицу и видовую матрицу для конфигурирования нескольких внутренних структур данных. Каждый раз, когда вы устанавливаете новую мировую или видовую матрицу, система пересчитывает соответствующие внутренние структуры. Частая установка этих матриц — например, несколько тысяч раз на кадр — занимает много вычислительного времени. Свести к минимуму количество необходимых вычислений можно путем конкатенации мировой и видовой матриц в мировую-видовую матрицу, задать ее в качестве мировой матрицы, а затем установить видовую матрицу в единичную. Сохраняйте кэшированные копии отдельных мировых и видовых матриц, чтобы вы могли изменять, объединять и сбрасывать мировую матрицу по необходимости. Для ясности в этой документации примеры Direct3D редко используют эту оптимизацию.
Связанные темы