Функция D3DXMatrixRotationYawPitchRoll (D3dx9math.h)
Примечание
Служебная библиотека D3DX устарела. Вместо этого рекомендуется использовать DirectXMath .
Создает матрицу с указанными рысканиями, шагами и рулонами.
Синтаксис
D3DXMATRIX* D3DXMatrixRotationYawPitchRoll(
_Inout_ D3DXMATRIX *pOut,
_In_ FLOAT Yaw,
_In_ FLOAT Pitch,
_In_ FLOAT Roll
);
Параметры
-
pOut [in, out]
-
Тип: D3DXMATRIX*
Указатель на структуру D3DXMATRIX , которая является результатом операции.
-
Yaw [in]
-
Тип: FLOAT
Рыскание вокруг оси Y в радианах.
-
Шаг [вход]
-
Тип: FLOAT
Шаг вокруг оси X в радианах.
-
Roll [in]
-
Тип: FLOAT
Обведите оси Z в радианах.
Возвращаемое значение
Тип: D3DXMATRIX*
Указатель на структуру D3DXMATRIX с указанными рыскания, шагом и рулоном.
Комментарии
Возвращаемое значение для этой функции совпадает с значением, возвращаемым в параметре pOut . Таким образом, функцию D3DXMatrixRotationYawPitchRoll можно использовать в качестве параметра для другой функции.
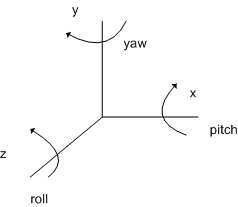
Порядок преобразований — сначала свернуть, затем шаг, а затем — рыснуть. Относительно локальной оси координат объекта это эквивалентно повороту вокруг оси Z, затем повороту вокруг оси X и повороту вокруг оси Y, как показано на следующем рисунке.
Требования
| Требование | Значение |
|---|---|
| Заголовок |
|
| Библиотека |
|
См. также раздел