Azure Kinect Viewer
Narzędzie Azure Kinect Viewer znajdujące się w katalogu zainstalowanych narzędzi ( k4aviewer.exe na przykład C:\Program Files\Azure Kinect SDK vX.Y.Z\tools\k4aviewer.exe, gdzie X.Y.Z jest zainstalowaną wersją zestawu SDK), może służyć do wizualizacji wszystkich strumieni danych urządzenia w celu:
- Sprawdź, czy czujniki działają prawidłowo.
- Pomoc w pozycjonowaniu urządzenia.
- Eksperymentuj z ustawieniami aparatu.
- Odczytywanie konfiguracji urządzenia.
- Nagrania odtwarzania wykonane za pomocą narzędzia Azure Kinect Recorder.
Aby uzyskać więcej informacji na temat przeglądarki Azure Kinect, obejrzyj film wideo How to use Azure Kinect (Jak używać zestawu Azure Kinect).
Usługa Azure Kinect Viewer jest oprogramowaniem open source i może służyć jako przykład sposobu używania interfejsów API.
Korzystanie z przeglądarki
Przeglądarka może działać w dwóch trybach: z danymi na żywo z czujnika lub z zarejestrowanych danych (Azure Kinect Recorder).
Uruchamianie aplikacji
Uruchom aplikację, uruchamiając polecenie k4aviewer.exe.
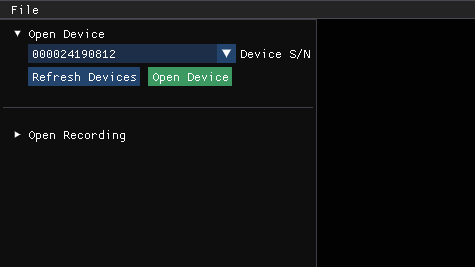
Używanie przeglądarki z danymi na żywo
- W sekcji Otwieranie urządzenia wybierz numer seryjny urządzenia do otwarcia. Następnie wybierz pozycję Odśwież, jeśli brakuje urządzenia.
- Wybierz przycisk Otwórz urządzenie.
- Wybierz pozycję Rozpocznij, aby rozpocząć przesyłanie strumieniowe danych przy użyciu ustawień domyślnych.
Używanie przeglądarki z zarejestrowanymi danymi
W sekcji Otwórz nagrywanie przejdź do zarejestrowanego pliku i wybierz go.
Sprawdzanie wersji oprogramowania układowego urządzenia
Uzyskaj dostęp do wersji oprogramowania układowego urządzenia w oknie konfiguracji, jak pokazano na poniższej ilustracji.
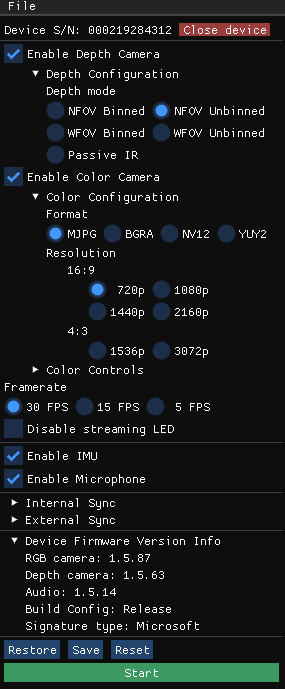
Na przykład w tym przypadku dostawca isp aparatu głębinowego działa FW 1.5.63.
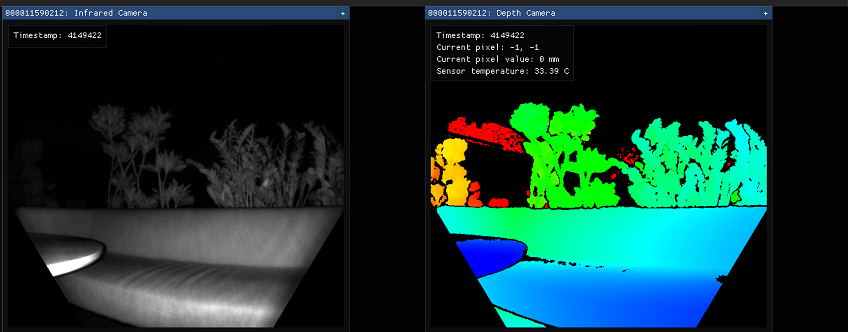
Kamera z pomiarem głębi
Przeglądarka aparatu głębokości pokaże dwa okna:
- Jedną z nich jest aktywna jasność , która jest obrazem skali szarości przedstawiającym jasność środowiska IR.
- Drugi nosi nazwę Głębokość, która ma kolorową reprezentację danych głębokości.
Umieść kursor na pikselach w oknie głębokości, aby wyświetlić wartość czujnika głębokości, jak pokazano poniżej.
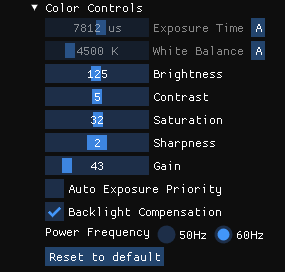
Kamera RGB
Na poniższej ilustracji przedstawiono widok kamery kolorów.

Ustawienia kamery RGB można kontrolować w oknie konfiguracji podczas przesyłania strumieniowego.
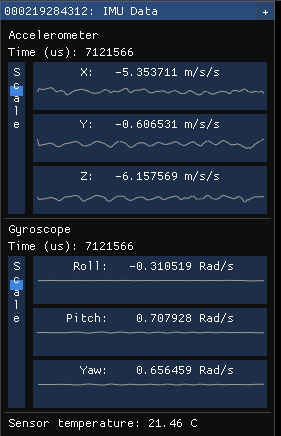
Jednostka miary inertial (IMU)
Okno IMU ma dwa składniki, akcelerometr i żyroskop.
Górna połowa to akcelerometr i pokazuje przyspieszenie liniowe w metrach/sekundach2. Obejmuje przyspieszenie z grawitacji, więc jeśli leży płasko na stole, oś Z prawdopodobnie pokaże około -9,8 m/s2.
Dolna połowa to część żyroskopu i pokazuje ruch obrotowy w radianach/sekundach
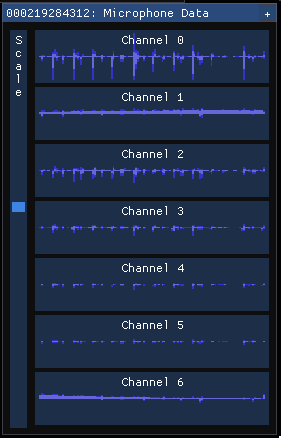
Wejście mikrofonu
Widok mikrofonu przedstawia reprezentację dźwięku słyszanego na każdym mikrofonie. Jeśli nie ma dźwięku, wykres jest wyświetlany jako pusty, w przeciwnym razie zobaczysz ciemnoniebieski kształt fali z jasnoniebieskim kształtem falowym nałożonym na nim.
Ciemna fala reprezentuje minimalne i maksymalne wartości obserwowane przez mikrofon w tym przedziale czasu. Fala światła reprezentuje kwadrat średniej głównej wartości obserwowanych przez mikrofon w tym przedziale czasu.
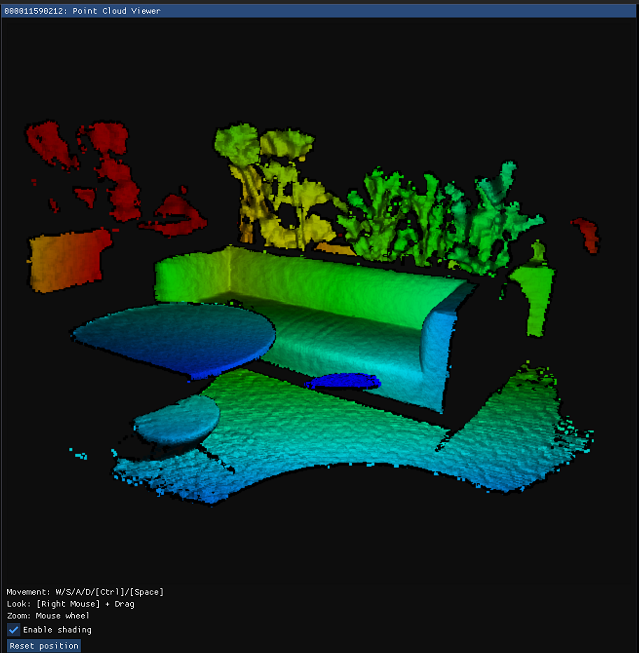
Wizualizacja chmury punktowej
Wizualizacja głębokości w 3D umożliwia przenoszenie obrazu przy użyciu poinstruowanych kluczy.
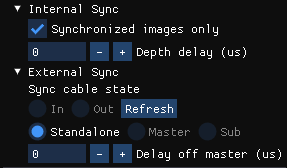
Kontrolka synchronizacji
Przeglądarka umożliwia skonfigurowanie urządzenia jako autonomicznego (domyślnego), głównego lub podrzędnego podczas konfigurowania synchronizacji z wieloma urządzeniami. Podczas zmieniania konfiguracji lub wstawiania/usuwania synchronizacji wybierz pozycję Odśwież , aby zaktualizować.