Souřadnicové systémy Azure Kinect DK
V tomto článku popisujeme konvence používané pro 2D a 3D souřadnicové systémy. Existují samostatné souřadnicové systémy spojené se zařízením každého senzoru a funkce kalibrace umožňují transformovat body mezi nimi. Transformační funkce transformují celé obrázky mezi souřadnicovými systémy.
2D souřadnicové systémy
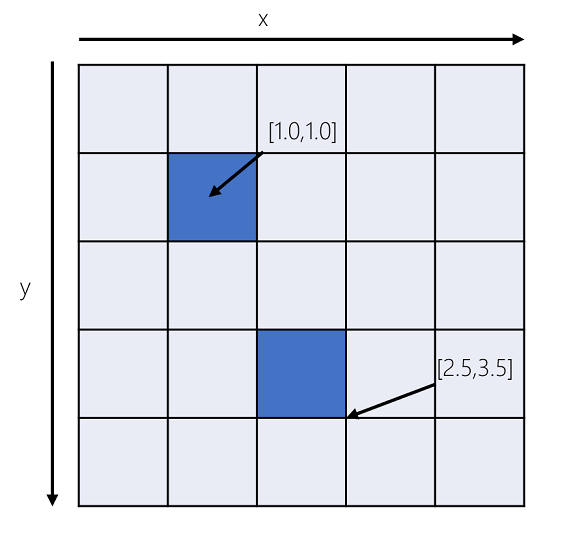
Hloubkové i barevné kamery jsou spojeny s nezávislým 2D souřadnicovým systémem. Souřadnice [x,y] je reprezentována v jednotkách pixelů, kde x se pohybuje od 0 do šířky-1 a rozsahy od 0 do výšky 1. Šířka a výška závisí na zvoleném režimu, ve kterém se obsluhují hloubkové a barevné kamery. Souřadnice [0,0] pixelů odpovídá levému hornímu pixelu obrázku. Souřadnice pixelů můžou být zlomkové představující souřadnice subpixelu.
2D souřadnicový systém je 0 na střed, tj. souřadnice [0.0, 0.0] subpixel představuje střed a [0.5,0.5] pravý dolní roh pixelu, jak je znázorněno níže.
3D souřadnicové systémy
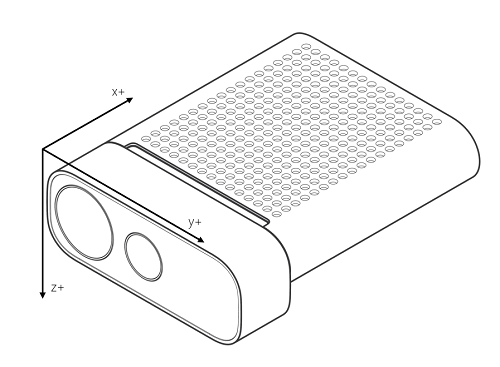
Každá kamera, akcelerometr a gyroskop jsou přidruženy k nezávislému 3D souřadnicovém prostoru systému.
Body v 3D souřadnicových systémech jsou reprezentovány jako metriky [X,Y,Z]-souřadnice trojitých jednotek v milimetrech.
Hloubková a barevná kamera
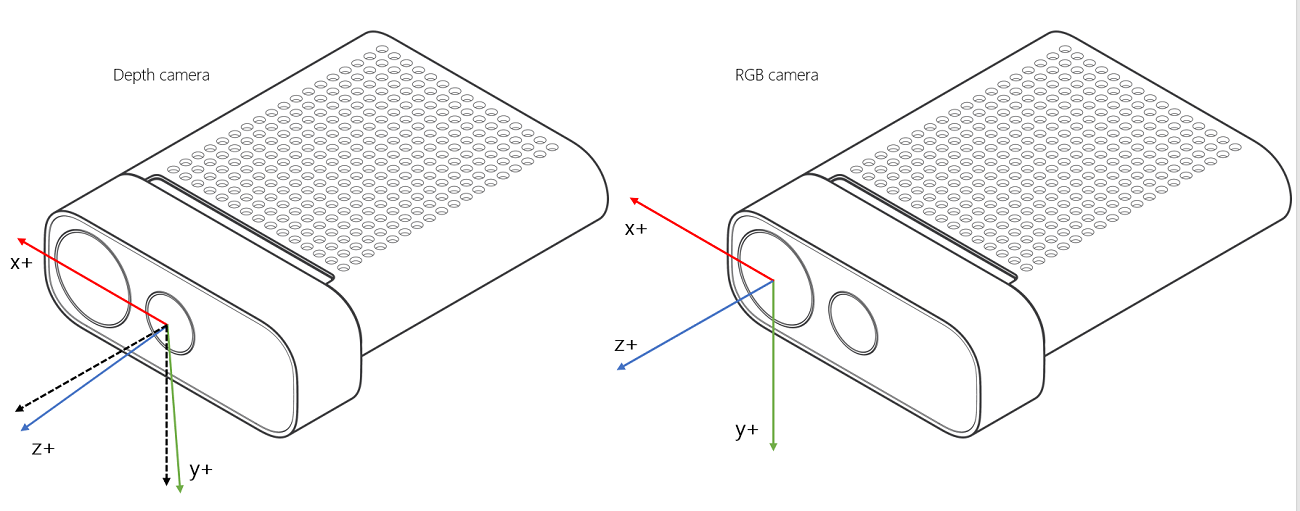
[0,0,0] Původ se nachází v centrálním bodě kamery. Souřadnicový systém je orientovaný tak, aby kladné body osy X doprava, kladné body osy Y dolů a kladné body osy Z vpřed.
Hloubková kamera je nakloněna o 6 stupňů dolů barevné kamery, jak je znázorněno níže.
Hloubková kamera používá dvě svítící přístroje. Svítící přístroj použitý v úzkých režimech zobrazení (NFOV) je zarovnán s velikostí hloubkové kamery, takže osvětlení není nakloněno. Osvětlení používané v režimech WFOV (Wide Field-of View) je nakloněno o dalších 1,3 stupňů dolů vzhledem k hloubkové kameře.
Gyroskop a akcelerometr
Původ gyroskopu [0,0,0] je shodný s původem hloubkové kamery. Původ akcelerometru se shoduje s jeho fyzickým umístěním. Souřadnicový systém akcelerometru i gyroskopu jsou pravé ruky. Pozitivní body osy X souřadnicového systému jsou zpět, kladné body osy Y vlevo a kladné body osy Z dolů, jak je znázorněno níže.