感知模擬
您要為您的應用程式建置自動化測試嗎? 您要讓測試超越元件層級單元測試,並真正練習應用程式端對端? 感知仿真是您要尋找的內容。 Perception Simulation 連結庫會將人力和世界輸入數據傳送至您的應用程式,以便您將測試自動化。 例如,您可以模擬人類對特定可重複位置的輸入,然後使用手勢或運動控制器。
Perception Simulation 可以將這類模擬輸入傳送至實體 HoloLens、HoloLens 模擬器(第一代)、HoloLens 2 模擬器,或已安裝混合實境入口網站的計算機。 Perception Simulation 會略過混合實境裝置上的即時感測器,並將仿真的輸入傳送至裝置上執行的應用程式。 應用程式會透過它們一律使用的相同 API 接收這些輸入事件,而且無法分辨使用實際感測器與 Perception Simulation 執行之間的差異。 Perception Simulation 是 HoloLens 模擬器用來將模擬輸入傳送至 HoloLens 虛擬機的相同技術。
若要開始在您的程序代碼中使用模擬,請先建立 IPerceptionSimulationManager 物件。 您可以從該對象發出命令來控制模擬「人類」的屬性,包括頭部位置、手部位置和手勢。 您也可以啟用及操作動作控制器。
設定 Visual Studio 專案以進行感知模擬
在開發電腦上安裝 HoloLens 模擬器 。 模擬器包含您用於 Perception Simulation 的連結庫。
建立新的 Visual Studio C# 桌面專案(主控台專案很適合開始使用)。
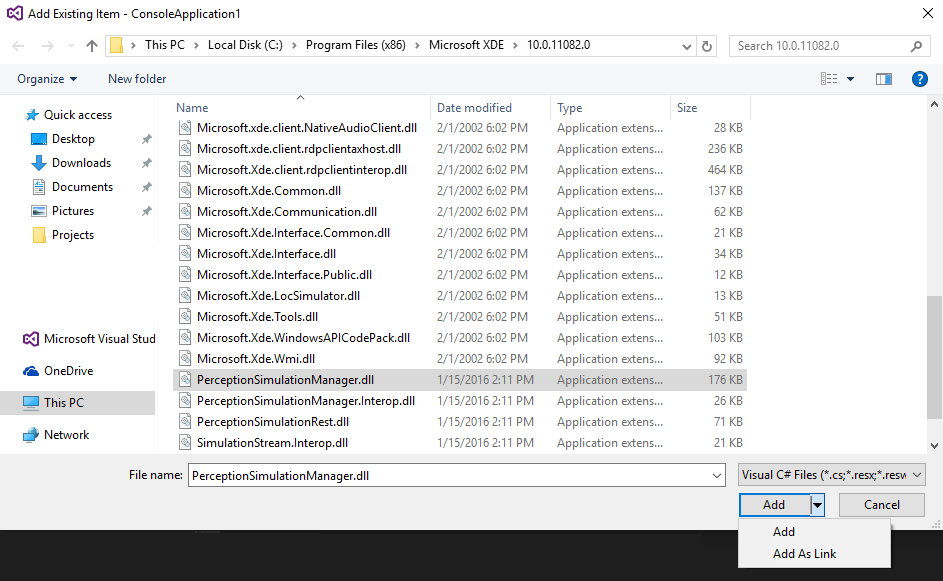
將下列二進位檔新增至您的專案作為參考(Project-Add-Reference>>...)。您可以在 %ProgramFiles(x86)%\Microsoft XDE\(version)中找到它們,例如 %ProgramFiles(x86)%\Microsoft XDE\10.0.18362.0。
注意
雖然二進位檔是 HoloLens 2 模擬器的一部分,但它們也適用於桌面上的 Windows Mixed Reality。
a. PerceptionSimulationManager.Interop.dll - Perception Simulation 的 Managed C# 包裝函式。
b. PerceptionSimulationRest.dll - 用來設定 HoloLens 或模擬器之 Web 套接字通道的連結庫。
c. SimulationStream.Interop.dll - 用於仿真的共享類型。將實作二進位PerceptionSimulationManager.dll新增至專案
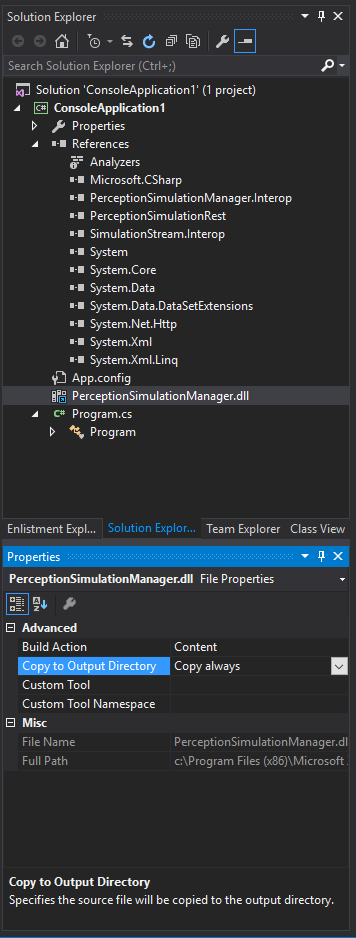
a. 首先,將它當做二進位檔新增至專案 (Project-Add-Existing>> Item...)。將它儲存為連結,使其不會複製到您的專案源資料夾。
b. 然後確定它會在組建時複製到您的輸出資料夾。 這在二進位檔的屬性表中。
將您的使用中解決方案平臺設定為 x64。 (如果尚未存在,請使用 Configuration Manager 建立 x64 的平台專案。
建立 IPerceptionSimulation Manager 物件
若要控制模擬,您將對從 IPerceptionSimulationManager 物件擷取的對象發出更新。 第一個步驟是取得該物件,並將其連線到您的目標裝置或模擬器。 按兩下工具列中的 [裝置入口網站] 按鈕,即可取得模擬器的IP位址
 開啟裝置入口網站:在模擬器中開啟 HoloLens OS 的 Windows 裝置入口網站。 針對 Windows Mixed Reality,這可以在 [設定] 應用程式的 [更新與安全性] 下擷取,然後在 [啟用裝置入口網站] 下的 [連線使用:] 區段中的 [適用於開發人員]。請務必同時記下IP位址和埠。
開啟裝置入口網站:在模擬器中開啟 HoloLens OS 的 Windows 裝置入口網站。 針對 Windows Mixed Reality,這可以在 [設定] 應用程式的 [更新與安全性] 下擷取,然後在 [啟用裝置入口網站] 下的 [連線使用:] 區段中的 [適用於開發人員]。請務必同時記下IP位址和埠。
首先,您將呼叫 RestSimulationStreamSink.Create 以取得 RestSimulationStreamSink 物件。 這是您將控制 HTTP 連線的目標裝置或模擬器。 您的命令將會由在裝置或模擬器上執行的 Windows 裝置入口網站傳遞及處理。 您需要建立物件的四個參數如下:
- URI URI - 目標裝置的IP位址(例如,“https://123.123.123.123"或 「https://123.123.123.123:50080")
- System.Net.NetworkCredential 認證 - 用於連線到 目標裝置或模擬器上 Windows 裝置入口網站 的使用者名稱/密碼。 如果您要透過其本機位址連線到模擬器(例如 168..*) 在同一部計算機上,將接受任何認證。
- bool normal - 如果為標準優先順序,則為 false 表示低優先順序。 針對測試案例,您通常想要將此設定為 true ,讓測試能夠控制。 模擬器和 Windows Mixed Reality 模擬會使用低優先順序連線。 如果您的測試也使用低優先順序連線,則最近建立的連線將會處於控制狀態。
- System.Threading.CancellationToken 令牌 - 取消異步作業的令牌。
其次,您將建立 IPerceptionSimulationManager。 這是您用來控制仿真的物件。 這也必須在異步方法中完成。
控制仿真的 Human
IPerceptionSimulationManager 具有會傳回 ISimulatedHuman 物件的 Human 属性。 若要控制仿真的人,請在此對象上執行作業。 例如:
manager.Human.Move(new Vector3(0.1f, 0.0f, 0.0f))
基本範例 C# 主控台應用程式
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading;
using System.Threading.Tasks;
using Microsoft.PerceptionSimulation;
namespace ConsoleApplication1
{
class Program
{
static void Main(string[] args)
{
Task.Run(async () =>
{
RestSimulationStreamSink sink = null;
CancellationToken token = new System.Threading.CancellationToken();
try
{
sink = await RestSimulationStreamSink.Create(
// use the IP address for your device/emulator
new Uri("https://169.254.227.115"),
// no credentials are needed for the emulator
new System.Net.NetworkCredential("", ""),
// normal priorty
true,
// cancel token
token);
IPerceptionSimulationManager manager = PerceptionSimulationManager.CreatePerceptionSimulationManager(sink);
}
catch (Exception e)
{
Console.WriteLine(e);
}
// Always close the sink to return control to the previous application.
if (sink != null)
{
await sink.Close(token);
}
});
// If main exits, the process exits.
Console.WriteLine("Press any key to exit...");
Console.ReadLine();
}
}
}
擴充範例 C# 主控台應用程式
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading;
using System.Threading.Tasks;
using Microsoft.PerceptionSimulation;
namespace ConsoleApplication1
{
class Program
{
static void Main(string[] args)
{
RestSimulationStreamSink sink = null;
CancellationToken token = new System.Threading.CancellationToken();
Task.Run(async () =>
{
try
{
sink = await RestSimulationStreamSink.Create(
// use the IP address for your device/emulator
new Uri("https://169.254.227.115"),
// no credentials are needed for the emulator
new System.Net.NetworkCredential("", ""),
// normal priorty
true,
// cancel token
token);
IPerceptionSimulationManager manager = PerceptionSimulationManager.CreatePerceptionSimulationManager(sink);
// Now, we'll simulate a sequence of actions.
// Sleeps in-between each action give time to the system
// to be able to properly react.
// This is just an example. A proper automated test should verify
// that the app has behaved correctly
// before proceeding to the next step, instead of using Sleeps.
// Activate the right hand
manager.Human.RightHand.Activated = true;
// Simulate Bloom gesture, which should cause Shell to disappear
manager.Human.RightHand.PerformGesture(SimulatedGesture.Home);
Thread.Sleep(2000);
// Simulate Bloom gesture again... this time, Shell should reappear
manager.Human.RightHand.PerformGesture(SimulatedGesture.Home);
Thread.Sleep(2000);
// Simulate a Head rotation down around the X axis
// This should cause gaze to aim about the center of the screen
manager.Human.Head.Rotate(new Rotation3(0.04f, 0.0f, 0.0f));
Thread.Sleep(300);
// Simulate a finger press & release
// Should cause a tap on the center tile, thus launching it
manager.Human.RightHand.PerformGesture(SimulatedGesture.FingerPressed);
Thread.Sleep(300);
manager.Human.RightHand.PerformGesture(SimulatedGesture.FingerReleased);
Thread.Sleep(2000);
// Simulate a second finger press & release
// Should activate the app that was launched when the center tile was clicked
manager.Human.RightHand.PerformGesture(SimulatedGesture.FingerPressed);
Thread.Sleep(300);
manager.Human.RightHand.PerformGesture(SimulatedGesture.FingerReleased);
Thread.Sleep(5000);
// Simulate a Head rotation towards the upper right corner
manager.Human.Head.Rotate(new Rotation3(-0.14f, 0.17f, 0.0f));
Thread.Sleep(300);
// Simulate a third finger press & release
// Should press the Remove button on the app
manager.Human.RightHand.PerformGesture(SimulatedGesture.FingerPressed);
Thread.Sleep(300);
manager.Human.RightHand.PerformGesture(SimulatedGesture.FingerReleased);
Thread.Sleep(2000);
// Simulate Bloom gesture again... bringing the Shell back once more
manager.Human.RightHand.PerformGesture(SimulatedGesture.Home);
Thread.Sleep(2000);
}
catch (Exception e)
{
Console.WriteLine(e);
}
});
// If main exits, the process exits.
Console.WriteLine("Press any key to exit...");
Console.ReadLine();
// Always close the sink to return control to the previous application.
if (sink != null)
{
sink.Close(token);
}
}
}
}
6-DOF 控制器上的注意事項
在模擬 6-DOF 控制器上呼叫方法的任何屬性之前,您必須先啟動控制器。 這樣做會導致例外狀況。 從 Windows 10 2019 年 5 月更新 開始,您可以將 ISimulatedSixDofController 物件的 Status 屬性設定為 SimulatedSixDofControllerStatus.Active,以安裝並啟動仿真的 6-DOF 控制器。 在 Windows 10 2018 年 10 月更新 和更早版本中,您必須先呼叫位於 \Windows\System32 資料夾中的 PerceptionSimulationDevice 工具,以個別安裝仿真的 6-DOF 控制器。 此工具的使用方式如下:
PerceptionSimulationDevice.exe <action> 6dof <instance>
例如:
PerceptionSimulationDevice.exe i 6dof 1
支援的動作如下:
- i = 安裝
- q = query
- r = remove
支援的實例包括:
- 1 = 左側 6-DOF 控制器
- 2 = 正確的 6-DOF 控制器
進程的結束代碼會指出成功(零傳回值)或失敗(非零傳回值)。 使用 'q' 動作來查詢控制器是否已安裝時,如果尚未安裝控制器,則傳回值會是零 (0),如果已安裝控制器,則傳回值會是 1。如果已安裝控制器,則傳回值會是 0。
移除 Windows 10 2018 年 10 月更新 或更早版本上的控制器時,請先透過 API 將其狀態設定為 [關閉],然後呼叫 PerceptionSimulationDevice 工具。
此工具必須以系統管理員身分執行。
API 參考
Microsoft.PerceptionSimulation.SimulatedDeviceType
描述模擬裝置類型
public enum SimulatedDeviceType
{
Reference = 0
}
Microsoft.PerceptionSimulation.SimulatedDeviceType.Reference
虛構參考裝置,PerceptionSimulationManager 的預設值
Microsoft.PerceptionSimulation.HeadTrackerMode
描述頭部追蹤器模式
public enum HeadTrackerMode
{
Default = 0,
Orientation = 1,
Position = 2
}
Microsoft.PerceptionSimulation.HeadTrackerMode.Default
默認頭部追蹤。 這表示系統可以根據運行時間條件選取最佳頭部追蹤模式。
Microsoft.PerceptionSimulation.HeadTrackerMode.Orientation
只有頭部追蹤的方向。 這表示追蹤的位置可能不可靠,而且某些相依於頭部位置的功能可能無法使用。
Microsoft.PerceptionSimulation.HeadTrackerMode.Position
位置頭部追蹤。 這表示追蹤的頭部位置和方向都是可靠的
Microsoft.PerceptionSimulation.SimulatedGesture
描述模擬手勢
public enum SimulatedGesture
{
None = 0,
FingerPressed = 1,
FingerReleased = 2,
Home = 4,
Max = Home
}
Microsoft.PerceptionSimulation.SimulatedGesture.None
Sentinel 值,用來表示沒有手勢。
Microsoft.PerceptionSimulation.SimulatedGesture.FingerPressed
手指按下手勢。
Microsoft.PerceptionSimulation.SimulatedGesture.FingerReleased
手指釋放手勢。
Microsoft.PerceptionSimulation.SimulatedGesture.Home
主/系統手勢。
Microsoft.PerceptionSimulation.SimulatedGesture.Max
有效筆勢上限。
Microsoft.PerceptionSimulation.SimulatedSixDofControllerStatus
模擬 6-DOF 控制器的可能狀態。
public enum SimulatedSixDofControllerStatus
{
Off = 0,
Active = 1,
TrackingLost = 2,
}
Microsoft.PerceptionSimulation.SimulatedSixDofControllerStatus.Off
6-DOF 控制器已關閉。
Microsoft.PerceptionSimulation.SimulatedSixDofControllerStatus.Active
6-DOF 控制器已開啟並追蹤。
Microsoft.PerceptionSimulation.SimulatedSixDofControllerStatus.TrackingLost
6-DOF 控制器已開啟,但無法追蹤。
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton
模擬 6-DOF 控制器上支援的按鈕。
public enum SimulatedSixDofControllerButton
{
None = 0,
Home = 1,
Menu = 2,
Grip = 4,
TouchpadPress = 8,
Select = 16,
TouchpadTouch = 32,
Thumbstick = 64,
Max = Thumbstick
}
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.None
Sentinel 值,用來表示沒有按鈕。
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.Home
按下 [首頁] 按鈕。
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.Menu
按下 [功能表] 按鈕。
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.Grip
按下 [夾上] 按鈕。
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.TouchpadPress
按下 TouchPad。
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.Select
按下 [選取] 按鈕。
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.TouchpadTouch
觸控式觸控板。
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.Thumbstick
按下遊戲桿。
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.Max
有效按鈕上限。
Microsoft.PerceptionSimulation.SimulatedEyesCalibrationState
模擬眼睛的校正狀態
public enum SimulatedGesture
{
Unavailable = 0,
Ready = 1,
Configuring = 2,
UserCalibrationNeeded = 3
}
Microsoft.PerceptionSimulation.SimulatedEyesCalibrationState.Unavailable
眼睛校正無法使用。
Microsoft.PerceptionSimulation.SimulatedEyesCalibrationState.Ready
眼睛已經校正了。 這是預設值。
Microsoft.PerceptionSimulation.SimulatedEyesCalibrationState.Configuring
眼睛正在校正。
Microsoft.PerceptionSimulation.SimulatedEyesCalibrationState.UserCalibrationNeeded
眼睛需要校正。
Microsoft.PerceptionSimulation.SimulatedHandJointTrackingAccuracy
手部關節的追蹤精確度。
public enum SimulatedHandJointTrackingAccuracy
{
Unavailable = 0,
Approximate = 1,
Visible = 2
}
Microsoft.PerceptionSimulation.SimulatedHandJointTrackingAccuracy.Unavailable
未追蹤關節。
Microsoft.PerceptionSimulation.SimulatedHandJointTrackingAccuracy.Approximate
推斷關節位置。
Microsoft.PerceptionSimulation.SimulatedHandJointTrackingAccuracy.Visible
關節已完全追蹤。
Microsoft.PerceptionSimulation.SimulatedHandPose
手部關節的追蹤精確度。
public enum SimulatedHandPose
{
Closed = 0,
Open = 1,
Point = 2,
Pinch = 3,
Max = Pinch
}
Microsoft.PerceptionSimulation.SimulatedHandPose.Closed
手的手指關節設定為反映封閉姿勢。
Microsoft.PerceptionSimulation.SimulatedHandPose.Open
手的手指關節已設定為反映開放式姿勢。
Microsoft.PerceptionSimulation.SimulatedHandPose.Point
手的手指關節已設定為反映指點姿勢。
Microsoft.PerceptionSimulation.SimulatedHandPose.Pinch
手的手指關節被設定為反映捏合姿勢。
Microsoft.PerceptionSimulation.SimulatedHandPose.Max
SimulatedHandPose 的最大有效值。
Microsoft.PerceptionSimulation.PlaybackState
描述播放的狀態。
public enum PlaybackState
{
Stopped = 0,
Playing = 1,
Paused = 2,
End = 3,
}
Microsoft.PerceptionSimulation.PlaybackState.Stopped
錄製目前已停止,且已準備好播放。
Microsoft.PerceptionSimulation.PlaybackState.Playing
錄製目前正在播放中。
Microsoft.PerceptionSimulation.PlaybackState.Paused
錄製目前已暫停。
Microsoft.PerceptionSimulation.PlaybackState.End
錄音已經結束。
Microsoft.PerceptionSimulation.Vector3
描述三個元件向量,這可能描述 3D 空間中的點或向量。
public struct Vector3
{
public float X;
public float Y;
public float Z;
public Vector3(float x, float y, float z);
}
Microsoft.PerceptionSimulation.Vector3.X
此向量的 X 元件。
Microsoft.PerceptionSimulation.Vector3.Y
此向量的 Y 元件。
Microsoft.PerceptionSimulation.Vector3.Z
此向量的 Z 元件。
Microsoft.PerceptionSimulation.Vector3.#ctor(System.Single,System.Single,System.Single)
建構新的 Vector3。
參數
- x - 向量的 x 元件。
- y - 向量的 y 元件。
- z - 向量的 z 元件。
Microsoft.PerceptionSimulation.Rotation3
描述三個元件輪替。
public struct Rotation3
{
public float Pitch;
public float Yaw;
public float Roll;
public Rotation3(float pitch, float yaw, float roll);
}
Microsoft.PerceptionSimulation.Rotation3.Pitch
旋轉的 [傾斜] 元件,在 X 軸周圍向下。
Microsoft.PerceptionSimulation.Rotation3.Yaw
Rotation 的 Yaw 元件,右繞 Y 軸。
Microsoft.PerceptionSimulation.Rotation3.Roll
Rotation 的 Roll 元件,靠右繞 Z 軸。
Microsoft.PerceptionSimulation.Rotation3.#ctor(System.Single,System.Single,System.Single)
建構新的 Rotation3。
參數
- 間距 - 旋轉的音調元件。
- yaw - 旋轉的 yaw 元件。
- roll - Rotation 的滾動元件。
Microsoft.PerceptionSimulation.SimulatedHandJointConfiguration
描述模擬手上聯結的組態。
public struct SimulatedHandJointConfiguration
{
public Vector3 Position;
public Rotation3 Rotation;
public SimulatedHandJointTrackingAccuracy TrackingAccuracy;
}
Microsoft.PerceptionSimulation.SimulatedHandJointConfiguration.Position
關節的位置。
Microsoft.PerceptionSimulation.SimulatedHandJointConfiguration.Rotation
關節的旋轉。
Microsoft.PerceptionSimulation.SimulatedHandJointConfiguration.TrackingAccuracy
關節的追蹤精確度。
Microsoft.PerceptionSimulation.Frustum
描述相機通常使用的檢視 frustum。
public struct Frustum
{
float Near;
float Far;
float FieldOfView;
float AspectRatio;
}
Microsoft.PerceptionSimulation.Frustum.Near
frustum 中包含的最小距離。
Microsoft.PerceptionSimulation.Frustum.Far
frustum 中包含的最大距離。
Microsoft.PerceptionSimulation.Frustum.FieldOfView
frustum 的水平檢視字段,以弧度為單位(小於 PI)。
Microsoft.PerceptionSimulation.Frustum.AspectRatio
水平檢視欄位與垂直檢視欄位的比例。
Microsoft.PerceptionSimulation.SimulatedDisplayConfiguration
描述模擬頭戴式裝置顯示器的設定。
public struct SimulatedDisplayConfiguration
{
public Vector3 LeftEyePosition;
public Rotation3 LeftEyeRotation;
public Vector3 RightEyePosition;
public Rotation3 RightEyeRotation;
public float Ipd;
public bool ApplyEyeTransforms;
public bool ApplyIpd;
}
Microsoft.PerceptionSimulation.SimulatedDisplayConfiguration.LeftEyePosition
從頭部中心到左眼的轉換,用於立體轉譯。
Microsoft.PerceptionSimulation.SimulatedDisplayConfiguration.LeftEyeRotation
為了立體轉譯的目的,左眼旋轉。
Microsoft.PerceptionSimulation.SimulatedDisplayConfiguration.RightEyePosition
從頭部中心到右眼的轉換,以便進行立體轉譯。
Microsoft.PerceptionSimulation.SimulatedDisplayConfiguration.RightEyeRotation
為了立體轉譯的目的,右眼旋轉。
Microsoft.PerceptionSimulation.SimulatedDisplayConfiguration.Ipd
系統針對立體轉譯所報告的 Ipd 值。
Microsoft.PerceptionSimulation.SimulatedDisplayConfiguration.ApplyEyeTransforms
提供給左右眼轉換的值是否應該視為有效,並套用至執行中的系統。
Microsoft.PerceptionSimulation.SimulatedDisplayConfiguration.ApplyIpd
是否應將提供給 Ipd 的值視為有效,並套用至執行中的系統。
Microsoft.PerceptionSimulation.IPerceptionSimulationManager
用來產生用來控制裝置之封包的根目錄。
public interface IPerceptionSimulationManager
{
ISimulatedDevice Device { get; }
ISimulatedHuman Human { get; }
void Reset();
}
Microsoft.PerceptionSimulation.IPerceptionSimulationManager.Device
擷取模擬裝置物件,以解譯仿真的人和模擬世界。
Microsoft.PerceptionSimulation.IPerceptionSimulationManager.Human
擷取控制模擬人類的物件。
Microsoft.PerceptionSimulation.IPerceptionSimulationManager.Reset
將模擬重設為其默認狀態。
Microsoft.PerceptionSimulation.ISimulatedDevice
描述裝置的介面,可解譯模擬世界和仿真的人
public interface ISimulatedDevice
{
ISimulatedHeadTracker HeadTracker { get; }
ISimulatedHandTracker HandTracker { get; }
void SetSimulatedDeviceType(SimulatedDeviceType type);
}
Microsoft.PerceptionSimulation.ISimulatedDevice.HeadTracker
從模擬裝置擷取前端追蹤器。
Microsoft.PerceptionSimulation.ISimulatedDevice.HandTracker
從模擬裝置擷取手部追蹤器。
Microsoft.PerceptionSimulation.ISimulatedDevice.SetSimulatedDeviceType(Microsoft.PerceptionSimulation.SimulatedDeviceType)
設定模擬裝置的屬性,以符合提供的裝置類型。
參數
- type - 新類型的模擬裝置
Microsoft.PerceptionSimulation.ISimulatedDevice2
將 ISimulatedDevice 轉換成 ISimulatedDevice2 即可取得其他屬性
public interface ISimulatedDevice2
{
bool IsUserPresent { [return: MarshalAs(UnmanagedType.Bool)] get; [param: MarshalAs(UnmanagedType.Bool)] set; }
SimulatedDisplayConfiguration DisplayConfiguration { get; set; }
};
Microsoft.PerceptionSimulation.ISimulatedDevice2.IsUserPresent
擷取或設定仿真的人是否正在主動佩戴頭戴式裝置。
Microsoft.PerceptionSimulation.ISimulatedDevice2.DisplayConfiguration
擷取或設定模擬顯示的屬性。
Microsoft.PerceptionSimulation.ISimulatedHeadTracker
介面,描述追蹤模擬人類頭部的模擬裝置部分。
public interface ISimulatedHeadTracker
{
HeadTrackerMode HeadTrackerMode { get; set; }
};
Microsoft.PerceptionSimulation.ISimulatedHeadTracker.HeadTrackerMode
擷取並設定目前的前端追蹤器模式。
Microsoft.PerceptionSimulation.ISimulatedHandTracker
介面,描述追蹤模擬人類之手的模擬裝置部分
public interface ISimulatedHandTracker
{
Vector3 WorldPosition { get; }
Vector3 Position { get; set; }
float Pitch { get; set; }
bool FrustumIgnored { [return: MarshalAs(UnmanagedType.Bool)] get; [param: MarshalAs(UnmanagedType.Bool)] set; }
Frustum Frustum { get; set; }
}
Microsoft.PerceptionSimulation.ISimulatedHandTracker.WorldPosition
以公尺為單位,擷取與世界相關的節點位置。
Microsoft.PerceptionSimulation.ISimulatedHandTracker.Position
擷取並設定模擬手部追蹤器的位置,相對於頭部的中心。
Microsoft.PerceptionSimulation.ISimulatedHandTracker.Pitch
擷取並設定模擬手部追蹤器的向下間距。
Microsoft.PerceptionSimulation.ISimulatedHandTracker.FrustumIgnored
擷取並設定是否忽略模擬手部追蹤器的 frustum。 忽略時,一律會顯示雙手。 當未忽略時(預設)手部只有在手部追蹤器的正向內時才會顯示。
Microsoft.PerceptionSimulation.ISimulatedHandTracker.Frustum
擷取並設定用來判斷模擬手部追蹤器是否可以看到手部的 frustum 屬性。
Microsoft.PerceptionSimulation.ISimulatedHuman
控制模擬人類的最上層介面。
public interface ISimulatedHuman
{
Vector3 WorldPosition { get; set; }
float Direction { get; set; }
float Height { get; set; }
ISimulatedHand LeftHand { get; }
ISimulatedHand RightHand { get; }
ISimulatedHead Head { get; }s
void Move(Vector3 translation);
void Rotate(float radians);
}
Microsoft.PerceptionSimulation.ISimulatedHuman.WorldPosition
以公尺為單位,擷取並設定與世界相關的節點位置。 位置會對應到人類腳的中心點。
Microsoft.PerceptionSimulation.ISimulatedHuman.Direction
擷取並設定模擬人類臉部在世界上的方向。 0 弧度朝負 Z 軸向下。 正弧度繞 Y 軸順時針旋轉。
Microsoft.PerceptionSimulation.ISimulatedHuman.Height
擷取並設定模擬人類的高度,以公尺為單位。
Microsoft.PerceptionSimulation.ISimulatedHuman.LeftHand
擷取模擬人的左手。
Microsoft.PerceptionSimulation.ISimulatedHuman.RightHand
擷取模擬人的右手。
Microsoft.PerceptionSimulation.ISimulatedHuman.Head
擷取模擬人類頭部。
Microsoft.PerceptionSimulation.ISimulatedHuman.Move(Microsoft.PerceptionSimulation.Vector3)
以公尺為單位,將仿真的人類相對於其目前位置移動。
參數
- translation - 要移動的翻譯,相對於目前位置。
Microsoft.PerceptionSimulation.ISimulatedHuman.Rotate(System.Single)
將仿真的人相對於其目前方向旋轉,順時針旋轉 Y 軸
參數
- 弧度 - 繞 Y 軸旋轉的數量。
Microsoft.PerceptionSimulation.ISimulatedHuman2
藉由將 ISimulatedHuman 轉換成 ISimulatedHuman2,即可取得其他屬性
public interface ISimulatedHuman2
{
/* New members in addition to those available on ISimulatedHuman */
ISimulatedSixDofController LeftController { get; }
ISimulatedSixDofController RightController { get; }
}
Microsoft.PerceptionSimulation.ISimulatedHuman2.LeftController
擷取左側 6-DOF 控制器。
Microsoft.PerceptionSimulation.ISimulatedHuman2.RightController
擷取正確的 6-DOF 控制器。
Microsoft.PerceptionSimulation.ISimulatedHand
描述模擬人類之手的介面
public interface ISimulatedHand
{
Vector3 WorldPosition { get; }
Vector3 Position { get; set; }
bool Activated { [return: MarshalAs(UnmanagedType.Bool)] get; [param: MarshalAs(UnmanagedType.Bool)] set; }
bool Visible { [return: MarshalAs(UnmanagedType.Bool)] get; }
void EnsureVisible();
void Move(Vector3 translation);
void PerformGesture(SimulatedGesture gesture);
}
Microsoft.PerceptionSimulation.ISimulatedHand.WorldPosition
以公尺為單位,擷取與世界相關的節點位置。
Microsoft.PerceptionSimulation.ISimulatedHand.Position
擷取並設定模擬手相對於人類的位置,以公尺為單位。
Microsoft.PerceptionSimulation.ISimulatedHand.Activated
擷取並設定目前是否啟動手部。
Microsoft.PerceptionSimulation.ISimulatedHand.Visible
擷取 SimulatedDevice 目前是否可以看到手部(也就是說,它是否位於 HandTracker 偵測的位置)。
Microsoft.PerceptionSimulation.ISimulatedHand.EnsureVisible
移動手部,讓 SimulatedDevice 可見。
Microsoft.PerceptionSimulation.ISimulatedHand.Move(Microsoft.PerceptionSimulation.Vector3)
以公尺為單位移動模擬手部相對於其目前位置的位置。
參數
- translation - 要翻譯模擬手部的數量。
Microsoft.PerceptionSimulation.ISimulatedHand.PerformGesture(Microsoft.PerceptionSimulation.SimulatedGesture)
使用模擬手部執行手勢。 只有在啟用手部時,系統才會偵測到它。
參數
- 手勢 - 要執行的手勢。
Microsoft.PerceptionSimulation.ISimulatedHand2
藉由將 ISimulatedHand 轉換成 ISimulatedHand2,即可取得其他屬性。
public interface ISimulatedHand2
{
/* New members in addition to those available on ISimulatedHand */
Rotation3 Orientation { get; set; }
}
Microsoft.PerceptionSimulation.ISimulatedHand2.Orientation
擷取或設定模擬手部的旋轉。 正弧度會在沿著座標軸時順時針旋轉。
Microsoft.PerceptionSimulation.ISimulatedHand3
將 ISimulatedHand 轉換成 ISimulatedHand3 即可取得其他屬性
public interface ISimulatedHand3
{
/* New members in addition to those available on ISimulatedHand and ISimulatedHand2 */
GetJointConfiguration(SimulatedHandJoint joint, out SimulatedHandJointConfiguration jointConfiguration);
SetJointConfiguration(SimulatedHandJoint joint, SimulatedHandJointConfiguration jointConfiguration);
SetHandPose(SimulatedHandPose pose, bool animate);
}
Microsoft.PerceptionSimulation.ISimulatedHand3.GetJointConfiguration
取得指定關節的聯結組態。
Microsoft.PerceptionSimulation.ISimulatedHand3.SetJointConfiguration
設定指定聯結的聯結組態。
Microsoft.PerceptionSimulation.ISimulatedHand3.SetHandPose
將手設定為具有選擇性旗標的已知姿勢,以產生動畫效果。 注意:動畫不會立即反映其最終的聯結組態。
Microsoft.PerceptionSimulation.ISimulatedHead
描述模擬人類頭部的介面。
public interface ISimulatedHead
{
Vector3 WorldPosition { get; }
Rotation3 Rotation { get; set; }
float Diameter { get; set; }
void Rotate(Rotation3 rotation);
}
Microsoft.PerceptionSimulation.ISimulatedHead.WorldPosition
以公尺為單位,擷取與世界相關的節點位置。
Microsoft.PerceptionSimulation.ISimulatedHead.Rotation
擷取模擬前端的旋轉。 正弧度會在沿著座標軸時順時針旋轉。
Microsoft.PerceptionSimulation.ISimulatedHead.Diameter
擷取模擬頭部直徑。 這個值是用來判斷頭部中心(旋轉點)。
Microsoft.PerceptionSimulation.ISimulatedHead.Rotate(Microsoft.PerceptionSimulation.Rotation3)
相對於其目前的旋轉,旋轉仿真的頭部。 正弧度會在沿著座標軸時順時針旋轉。
參數
- rotation - 要旋轉的數量。
Microsoft.PerceptionSimulation.ISimulatedHead2
將 ISimulatedHead 轉換成 ISimulatedHead2 即可取得其他屬性
public interface ISimulatedHead2
{
/* New members in addition to those available on ISimulatedHead */
ISimulatedEyes Eyes { get; }
}
Microsoft.PerceptionSimulation.ISimulatedHead2.Eyes
擷取模擬人的眼睛。
Microsoft.PerceptionSimulation.ISimulatedSixDofController
介面,描述與模擬人類相關聯的 6-DOF 控制器。
public interface ISimulatedSixDofController
{
Vector3 WorldPosition { get; }
SimulatedSixDofControllerStatus Status { get; set; }
Vector3 Position { get; }
Rotation3 Orientation { get; set; }
void Move(Vector3 translation);
void PressButton(SimulatedSixDofControllerButton button);
void ReleaseButton(SimulatedSixDofControllerButton button);
void GetTouchpadPosition(out float x, out float y);
void SetTouchpadPosition(float x, float y);
}
Microsoft.PerceptionSimulation.ISimulatedSixDofController.WorldPosition
以公尺為單位,擷取與世界相關的節點位置。
Microsoft.PerceptionSimulation.ISimulatedSixDofController.Status
擷取或設定控制器的目前狀態。 控制器狀態必須設定為 [關閉] 以外的值,才能成功移動、旋轉或按下按鈕的任何呼叫。
Microsoft.PerceptionSimulation.ISimulatedSixDofController.Position
擷取或設定模擬控制器相對於人類的位置,以公尺為單位。
Microsoft.PerceptionSimulation.ISimulatedSixDofController.Orientation
擷取或設定模擬控制器的方向。
Microsoft.PerceptionSimulation.ISimulatedSixDofController.Move(Microsoft.PerceptionSimulation.Vector3)
以公尺為單位,將模擬控制器的位置相對於其目前位置移動。
參數
- translation - 轉譯模擬控制器的數量。
Microsoft.PerceptionSimulation.ISimulatedSixDofController.PressButton(SimulatedSixDofControllerButton)
按下模擬控制器上的按鈕。 只有在啟用控制器時,系統才會偵測到它。
參數
- button - 要按下的按鈕。
Microsoft.PerceptionSimulation.ISimulatedSixDofController.ReleaseButton(SimulatedSixDofControllerButton)
釋放模擬控制器上的按鈕。 只有在啟用控制器時,系統才會偵測到它。
參數
- button - 要釋放的按鈕。
Microsoft.PerceptionSimulation.ISimulatedSixDofController.GetTouchpadPosition(out float, out float)
取得模擬控制器觸控板上模擬手指的位置。
參數
- x - 手指的水準位置。
- y - 手指的垂直位置。
Microsoft.PerceptionSimulation.ISimulatedSixDofController.SetTouchpadPosition(float, float)
設定模擬控制器觸控板上模擬手指的位置。
參數
- x - 手指的水準位置。
- y - 手指的垂直位置。
Microsoft.PerceptionSimulation.ISimulatedSixDofController2
將 ISimulatedSixDofController 轉換成 ISimulatedSixDofController2 即可取得其他屬性和方法
public interface ISimulatedSixDofController2
{
/* New members in addition to those available on ISimulatedSixDofController */
void GetThumbstickPosition(out float x, out float y);
void SetThumbstickPosition(float x, float y);
float BatteryLevel { get; set; }
}
Microsoft.PerceptionSimulation.ISimulatedSixDofController2.GetThumbstickPosition(out float, out float)
取得模擬控制器上模擬遊戲桿的位置。
參數
- x - 遊戲桿的水準位置。
- y - 遊戲桿的垂直位置。
Microsoft.PerceptionSimulation.ISimulatedSixDofController2.SetThumbstickPosition(float, float)
設定模擬控制器上模擬遊戲桿的位置。
參數
- x - 遊戲桿的水準位置。
- y - 遊戲桿的垂直位置。
Microsoft.PerceptionSimulation.ISimulatedSixDofController2.BatteryLevel
擷取或設定模擬控制器的電池電量。 值必須大於 0.0,且小於或等於 100.0。
Microsoft.PerceptionSimulation.ISimulatedEyes
描述模擬人類眼睛的介面。
public interface ISimulatedEyes
{
Rotation3 Rotation { get; set; }
void Rotate(Rotation3 rotation);
SimulatedEyesCalibrationState CalibrationState { get; set; }
Vector3 WorldPosition { get; }
}
Microsoft.PerceptionSimulation.ISimulatedEyes.Rotation
擷取模擬眼睛的旋轉。 正弧度會在沿著座標軸時順時針旋轉。
Microsoft.PerceptionSimulation.ISimulatedEyes.Rotate(Microsoft.PerceptionSimulation.Rotation3)
相對於其目前的旋轉,旋轉仿真的眼睛。 正弧度會在沿著座標軸時順時針旋轉。
參數
- rotation - 要旋轉的數量。
Microsoft.PerceptionSimulation.ISimulatedEyes.CalibrationState
擷取或設定模擬眼睛的校正狀態。
Microsoft.PerceptionSimulation.ISimulatedEyes.WorldPosition
以公尺為單位,擷取與世界相關的節點位置。
Microsoft.PerceptionSimulation.ISimulationRecording
介面,用於與載入以進行播放的單一錄製互動。
public interface ISimulationRecording
{
StreamDataTypes DataTypes { get; }
PlaybackState State { get; }
void Play();
void Pause();
void Seek(UInt64 ticks);
void Stop();
};
Microsoft.PerceptionSimulation.ISimulationRecording.DataTypes
擷取錄製中的數據類型清單。
Microsoft.PerceptionSimulation.ISimulationRecording.State
擷取錄製的目前狀態。
Microsoft.PerceptionSimulation.ISimulationRecording.Play
啟動播放。 如果錄製暫停,播放會從暫停的位置繼續播放;如果已停止,則播放會在開頭開始。 如果已經播放,則會忽略此呼叫。
Microsoft.PerceptionSimulation.ISimulationRecording.Pause
暫停其目前位置的播放。 如果錄製停止,則會忽略呼叫。
Microsoft.PerceptionSimulation.ISimulationRecording.Seek(System.UInt64)
搜尋錄製到指定的時間(從開頭開始的 100 奈秒間隔中),並在該位置暫停。 如果時間超出錄製的結尾,則會在最後一個畫面暫停。
參數
- ticks - 要搜尋的時間。
Microsoft.PerceptionSimulation.ISimulationRecording.Stop
停止播放,並將位置重設為開頭。
Microsoft.PerceptionSimulation.ISimulationRecordingCallback
用於在播放期間接收狀態變更的介面。
public interface ISimulationRecordingCallback
{
void PlaybackStateChanged(PlaybackState newState);
};
Microsoft.PerceptionSimulation.ISimulationRecordingCallback.PlaybackStateChanged(Microsoft.PerceptionSimulation.PlaybackState)
當 ISimulationRecording 的播放狀態變更時呼叫。
參數
- newState - 錄製的新狀態。
Microsoft.PerceptionSimulation.PerceptionSimulationManager
用於建立 Perception Simulation 物件的根物件。
public static class PerceptionSimulationManager
{
public static IPerceptionSimulationManager CreatePerceptionSimulationManager(ISimulationStreamSink sink);
public static ISimulationStreamSink CreatePerceptionSimulationRecording(string path);
public static ISimulationRecording LoadPerceptionSimulationRecording(string path, ISimulationStreamSinkFactory factory);
public static ISimulationRecording LoadPerceptionSimulationRecording(string path, ISimulationStreamSinkFactory factory, ISimulationRecordingCallback callback);
Microsoft.PerceptionSimulation.PerceptionSimulationManager.CreatePerceptionSimulationManager(Microsoft.PerceptionSimulation.ISimulationStreamSink)
在物件上建立 ,以產生模擬封包,並將其傳遞至提供的接收。
參數
- 接收 - 接收將接收所有產生的封包的接收。
傳回值
建立的管理員。
Microsoft.PerceptionSimulation.PerceptionSimulationManager.CreatePerceptionSimulationRecording(System.String)
建立接收,以將所有接收的封包儲存在指定路徑的檔案中。
參數
- path - 要建立之檔案的路徑。
傳回值
建立的接收。
Microsoft.PerceptionSimulation.PerceptionSimulationManager.LoadPerceptionSimulationRecording(System.String,Microsoft.PerceptionSimulation.ISimulationStreamSinkFactory)
從指定的檔案載入錄製。
參數
- path - 要載入之檔案的路徑。
- factory - 記錄在必要時用來建立 ISimulationStreamSink 的處理站。
傳回值
載入的錄製。
Microsoft.PerceptionSimulation.PerceptionSimulationManager.LoadPerceptionSimulationRecording(System.String,Microsoft.PerceptionSimulation.ISimulationStreamSinkFactory,Microsoft.PerceptionSimulation.ISimulationRecordingCallback)
從指定的檔案載入錄製。
參數
- path - 要載入之檔案的路徑。
- factory - 記錄在必要時用來建立 ISimulationStreamSink 的處理站。
- callback - 回呼,接收重新降級錄製狀態的更新。
傳回值
載入的錄製。
Microsoft.PerceptionSimulation.StreamDataTypes
描述不同類型的數據流數據。
public enum StreamDataTypes
{
None = 0x00,
Head = 0x01,
Hands = 0x02,
SpatialMapping = 0x08,
Calibration = 0x10,
Environment = 0x20,
SixDofControllers = 0x40,
Eyes = 0x80,
DisplayConfiguration = 0x100
All = None | Head | Hands | SpatialMapping | Calibration | Environment | SixDofControllers | Eyes | DisplayConfiguration
}
Microsoft.PerceptionSimulation.StreamDataTypes.None
Sentinel 值,用來指出沒有數據流數據類型。
Microsoft.PerceptionSimulation.StreamDataTypes.Head
頭部位置和方向的數據串流。
Microsoft.PerceptionSimulation.StreamDataTypes.Hands
手部位置和手勢的數據串流。
Microsoft.PerceptionSimulation.StreamDataTypes.SpatialMapping
環境空間對應的數據流。
Microsoft.PerceptionSimulation.StreamDataTypes.校正
用於校正裝置的數據串流。 校正封包只會由遠端模式中的系統接受。
Microsoft.PerceptionSimulation.StreamDataTypes.Environment
裝置環境的數據串流。
Microsoft.PerceptionSimulation.StreamDataTypes.SixDofControllers
運動控制器的數據串流。
Microsoft.PerceptionSimulation.StreamDataTypes.Eyes
具有模擬人類眼睛的數據串流。
Microsoft.PerceptionSimulation.StreamDataTypes.DisplayConfiguration
具有裝置顯示組態的數據串流。
Microsoft.PerceptionSimulation.StreamDataTypes.All
Sentinel 值,用來指出所有記錄的數據類型。
Microsoft.PerceptionSimulation.ISimulationStreamSink
物件,從模擬數據流接收數據封包。
public interface ISimulationStreamSink
{
void OnPacketReceived(uint length, byte[] packet);
}
Microsoft.PerceptionSimulation.ISimulationStreamSink.OnPacketReceived(uint length, byte[] packet)
接收單一封包,這是內部型別和版本設定。
參數
- length - 封包的長度。
- packet - 封包的數據。
Microsoft.PerceptionSimulation.ISimulationStreamSinkFactory
建立 ISimulationStreamSink 的物件。
public interface ISimulationStreamSinkFactory
{
ISimulationStreamSink CreateSimulationStreamSink();
}
Microsoft.PerceptionSimulation.ISimulationStreamSinkFactory.CreateSimulationStreamSink()
建立 ISimulationStreamSink 的單一實例。
傳回值
建立的接收。