快速入門 - 開始使用適用於 Azure Digital Twins 的 3D Scenes Studio (預覽)
Azure Digital Twins 3D Scenes Studio (預覽) 是沉浸式 3D 環境,企業和前線工作者可以使用視覺內容,取用和調查來自其 Azure Digital Twins 解決方案的作業資料。
在本文中,您將設定使用 3D Scenes Studio 的所有必要資源,包括具有範例資料的 Azure Digital Twins 執行個體,以及 Azure 儲存體資源。 然後,您將在連線至範例 Azure Digital Twins 環境的 Studio 中建立場景。
本快速入門中使用的此範例場景將監視工廠中機械手臂的承載效率。 機械手臂每小時會揀取一定數量的方塊,而視訊相機會監視每個手臂,以偵測手臂是否無法揀取方塊。 每個手臂在 Azure Digital Twins 中都有相關聯的數位對應項,而且每當手臂遺漏方塊時,數位對應項的資料都會更新。 在此案例中,本快速入門會逐步引導您設定 3D 場景,以將工廠中的手臂視覺化,以及每次遺漏方塊時的視覺警示。
場景看起來會像這樣:

必要條件
您需要 Azure 訂用帳戶來完成本快速入門。 如果您沒有 Azure 訂用帳戶,請立即建立一個免費帳戶。
您也需要下載範例 glTF (圖形語言傳輸格式) 3D 檔案,以在本快速入門中的場景使用。 從 GitHub 下載下列範例檔案: RobotArms.glb。
設定 Azure Digital Twins 和範例資料
使用 Azure Digital Twins 的第一個步驟是建立 Azure Digital Twins 執行個體。 建立服務的執行個體之後,您可以稍後在快速入門中將該執行個體連結至 3D Scenes Studio 視覺效果。
本節的其餘部分會引導您完成執行個體的建立。 如果您已經透過先前的快速入門設定 Azure Digital Twins 執行個體,您可以跳至下一節。
建立 Azure Digital Twins 執行個體
在本節中,您將使用 Azure 入口網站建立 Azure Digital Twins 的新執行個體。 瀏覽至入口網站,並使用您的認證登入。
一旦在入口網站中,請從在 Azure 服務首頁功能表中選取 [建立資源] 開始。
![Azure 入口網站的螢幕擷取畫面,其中醒目提示首頁的 [建立資源] 圖示。](media/how-to-set-up-instance/portal/create-resource.png)
在搜尋方塊中搜尋 azure digital twins,然後從結果中選擇 Azure Digital Twins 服務。
將 [方案] 欄位保留為 Azure Digital Twins,然後選取 [建立] 按鈕以開始建立服務的新執行個體。
![Azure 入口網站的螢幕擷取畫面,其中醒目提示 Azure Digital Twins 服務頁面中的 [建立] 按鈕。](media/how-to-set-up-instance/portal/create-azure-digital-twins.png)
在設定的 [基本] 索引標籤上填寫欄位,包括您的訂用帳戶、資源群組、新執行個體的資源名稱和區域。 勾選 [指派 Azure Digital Twins 資料擁有者角色] 方塊,讓您自己有權管理執行個體中的資料。
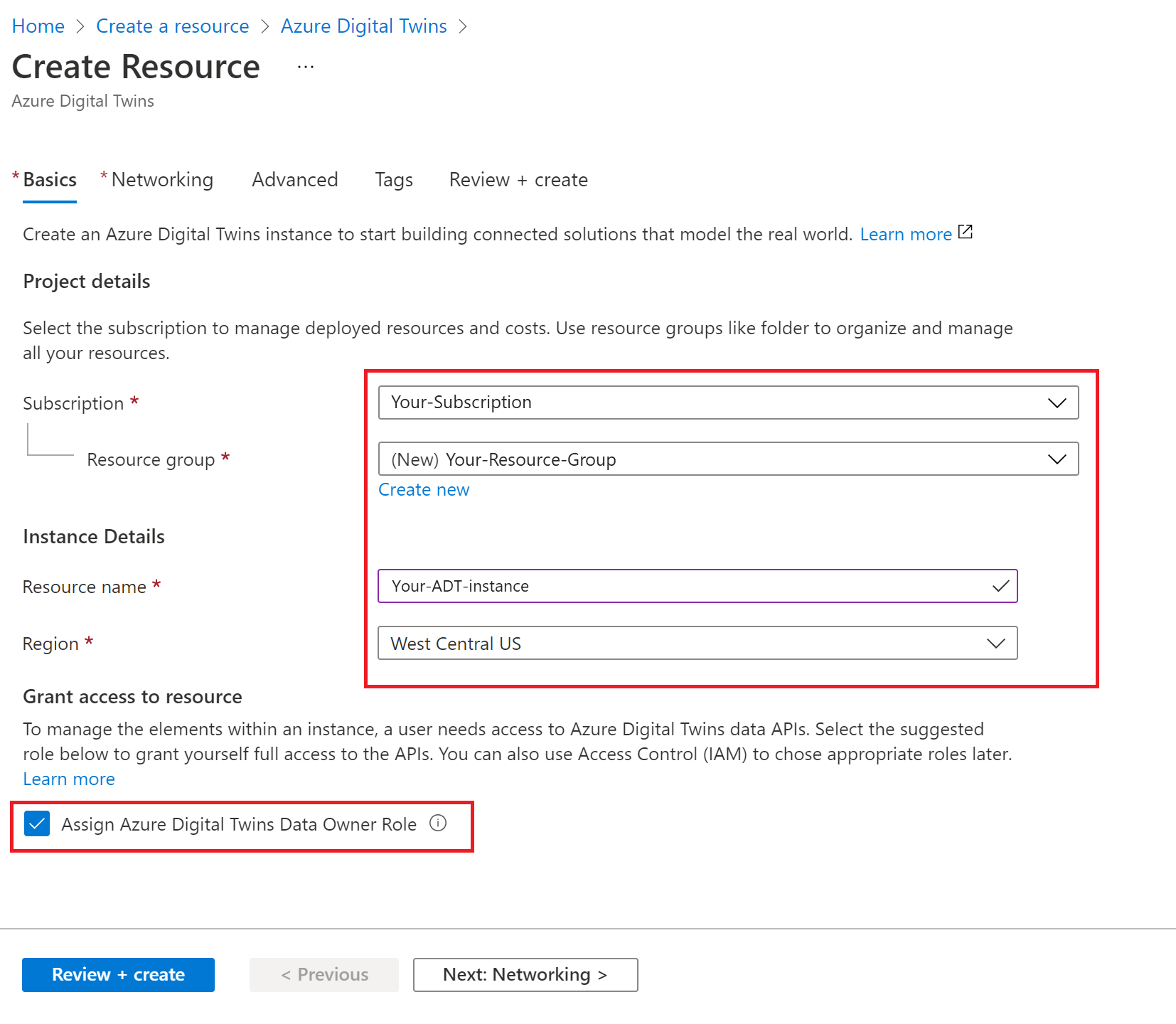
注意
如果 [指派 Azure Digital Twins 資料擁有者角色] 方塊呈現灰色停用狀態,表示您沒有 Azure 訂用帳戶中的權限來管理使用者對資源的存取權。 您可以繼續在本節中建立執行個體,然後應該先讓具有必要權限的人員在執行個體上為您指派此角色,再完成本快速入門的其餘部分。
符合此需求的常見角色包括:擁有者、帳戶管理員,或使用者存取管理員與參與者的組合。
選取 [檢閱 + 建立] 以完成您的執行個體建立。
您會看到摘要頁面,其中顯示您輸入的詳細資料。 選取 [建立],確認並建立執行個體。
這會帶您前往 [概觀] 頁面,以追蹤執行個體的部署狀態。
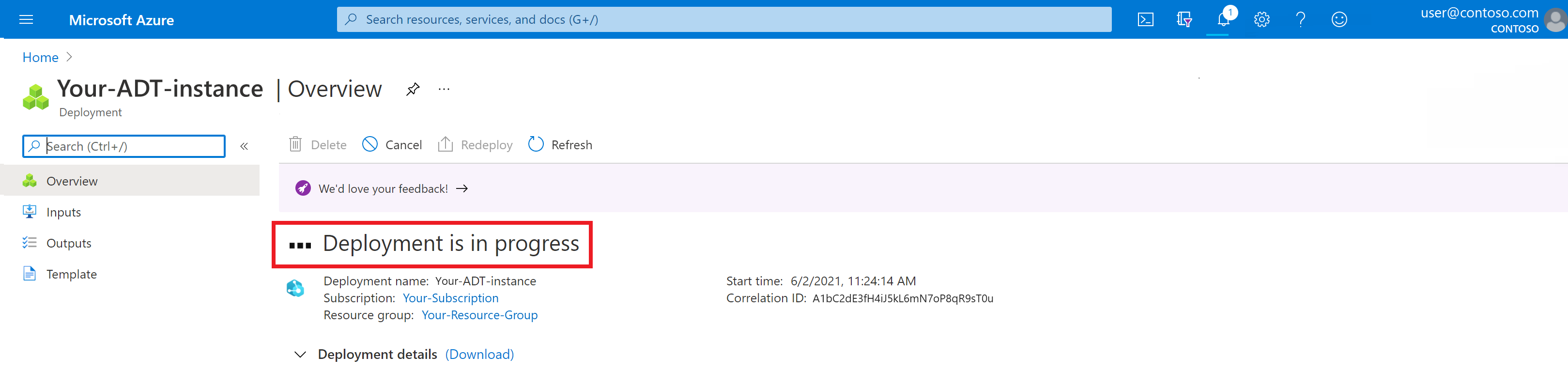
等候頁面指出您的部署已完成。
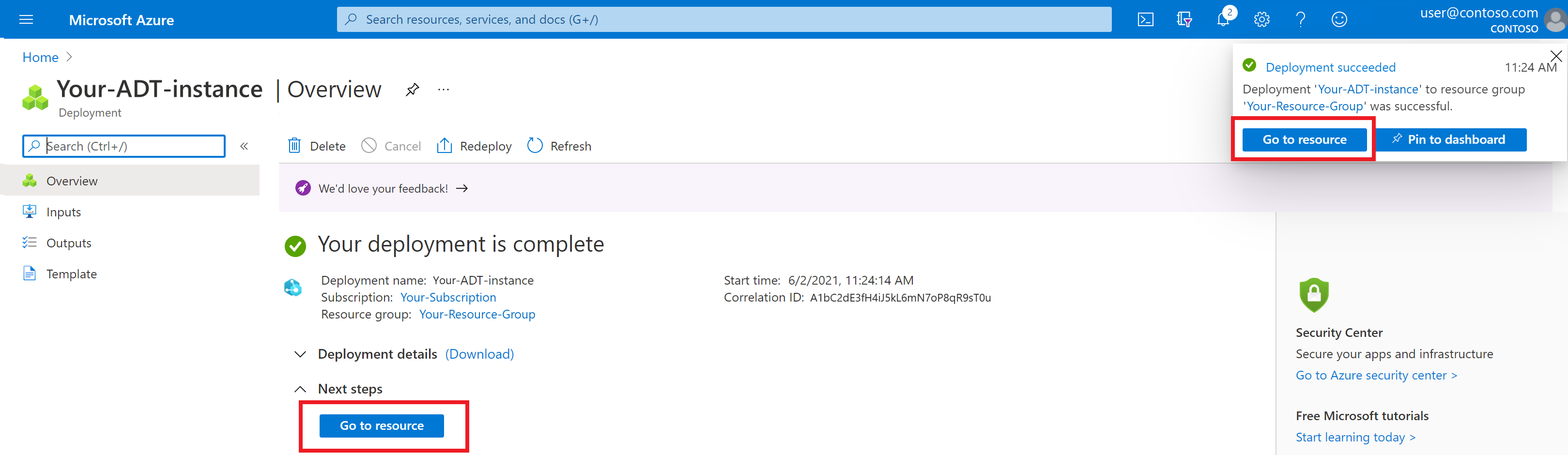
收集主機名稱
部署完成之後,請使用 [移至資源] 按鈕以瀏覽至入口網站中執行個體的 [概觀] 頁面。
接下來,記下執行個體的 [主機名稱] 值,以供稍後使用。
![Azure 入口網站 螢幕快照,其中顯示 Azure Digital Twins 實例的 [概觀] 頁面。主機名會反白顯示。](media/quickstart-3d-scenes-studio/host-name.png#lightbox)
產生範例模型和對應項
在本節中,您將使用 Azure Digital Twins 資料模擬器工具來產生範例模型和對應項,以填入您的執行個體。 然後,您將使用模擬器將範例資料串流至圖表中的對應項。
注意
本快速入門中為您提供的模型、對應項和模擬資料,是為了簡化建立您可以在 3D Scenes Studio 中檢視的環境程序。 設計您自己的完整 Azure Digital Twins 解決方案時,您將自行建立模型和對應項,以詳細描述您自己的環境,並據以設定您自己的資料流程。
此範例案例呈現包含六個機械手臂的封裝配送中心。 每個手臂都有一個數位對應項,具有屬性可追蹤手臂無法揀取多少個方塊,以及遺漏方塊的識別碼。
瀏覽至網頁瀏覽器中的 資料模擬器。
在 [執行個體 URL] 空間中,輸入來自上一節的 Azure Digital Twins 執行個體的 [主機名稱]。 將 [模擬類型] 設定為 [機械手臂]。
使用 [產生環境] 按鈕來建立具有模型和對應項的範例環境。 (如果您的執行個體中已經有模型和對應項,這麼做並不會刪除它們,只會新增更多項目。)
![Azure Digital Twins 數據模擬器的螢幕快照。[產生環境] 按鈕會反白顯示。](media/quickstart-3d-scenes-studio/data-simulator.png)
向下捲動並選取 [開始模擬] 以開始將模擬資料傳送至 Azure Digital Twins 執行個體。 只有在開啟此視窗且 [開始模擬] 選項處於作用中時,才會執行模擬。
![Azure Digital Twins 數據模擬器的螢幕快照。[產生環境] 按鈕會反白顯示。](media/quickstart-3d-scenes-studio/data-simulator.png#lightbox)
您可以使用 Azure Digital Twins Explorer Graph 工具來檢視已建立的模型和圖形。 若要切換至該工具,請從左側功能表選取 Graph 圖示。

然後,使用 [執行查詢] 按鈕來查詢執行個體中已建立的所有對應項和關聯性。
![Azure Digital Twins Explorer 的螢幕快照,其中醒目提示視窗右上角的 [執行查詢] 按鈕。](media/quickstart-3d-scenes-studio/run-query.png#lightbox)
您可以選取每個對應項,以更詳細地檢視它們。
若要查看已上傳的模型及其彼此的關聯性,請選取 [建立圖表模型]。
![Azure Digital Twins Explorer 的螢幕快照,其中醒目提示檢視窗格的 [模型圖形] 按鈕。](media/quickstart-3d-scenes-studio/model-graph.png#lightbox)
提示
如需 Azure Digital Twins Explorer 的簡介,請參閱快速入門:開始使用 Azure Digital Twins Explorer。
建立儲存體資源
接下來,在儲存體帳戶中建立新的儲存體帳戶和容器。 3D Scenes Studio 將使用此儲存體容器來儲存您的 3D 檔案和設定資訊。
您也會設定儲存體帳戶的讀取和寫入權限。 為了快速設定這些支援資源,本節使用 Azure Cloud Shell。
在瀏覽器中,導覽至 Cloud Shell。
執行下列命令,將 CLI 內容設定為此工作階段的訂用帳戶。
az account set --subscription "<your-Azure-subscription-ID>"執行下列命令,以在訂用帳戶建立儲存體帳戶。 此命令包含可讓您輸入名稱的預留位置,並選擇儲存體帳戶的區域,以及資源群組的預留位置。
az storage account create --resource-group <your-resource-group> --name <name-for-your-storage-account> --location <region> --sku Standard_RAGRS命令成功完成時,您將會在輸出中看到新儲存體帳戶的詳細資料。 尋找輸出中的
ID值,並進行複製以在下一個命令中使用。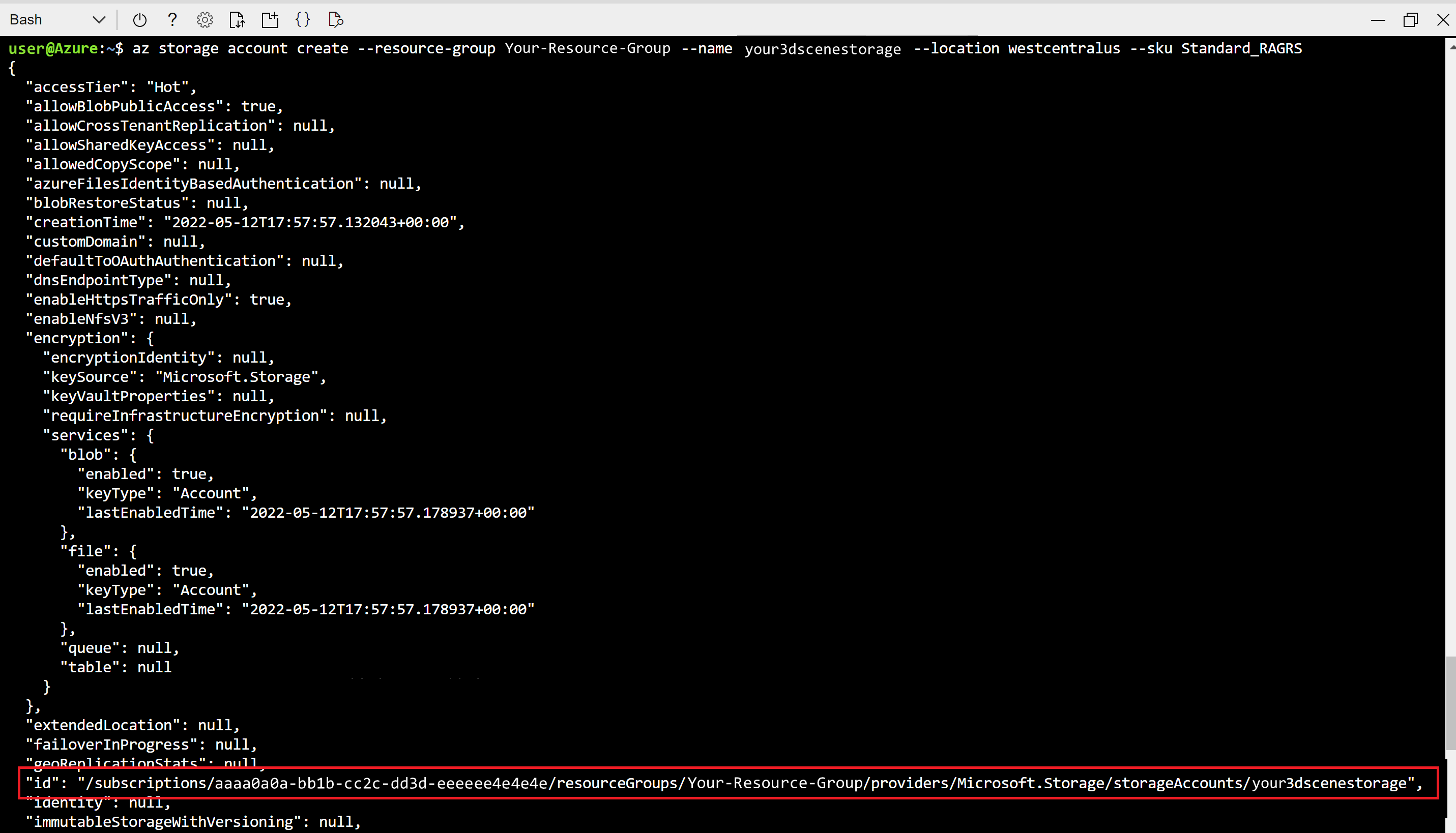
執行下列命令,將儲存體帳戶上的 [儲存體 Blob 資料擁有者] 授與您自己。 此存取層級可讓您在 3D Scenes Studio 中執行讀取和寫入作業。 此命令包含與 Azure 帳戶相關聯的電子郵件的預留位置,以及您在上一個步驟中複製之儲存體帳戶的識別碼。
az role assignment create --role "Storage Blob Data Owner" --assignee <your-Azure-email> --scope <ID-of-your-storage-account>命令成功完成時,您將會在輸出中看到角色指派的詳細資料。
執行下列命令,以設定儲存體帳戶的 CORS。 這是讓 3D Scenes Studio 存取您的儲存體容器所需。 此命令包含儲存體帳戶名稱的預留位置。
az storage cors add --services b --methods GET OPTIONS POST PUT --origins https://explorer.digitaltwins.azure.net --allowed-headers Authorization x-ms-version x-ms-blob-type --account-name <your-storage-account>此命令沒有任何輸出。
執行下列命令,以在儲存體帳戶中建立私人容器。 您的 3D Scenes Studio 檔案將會儲存在這裡。 此命令包含可讓您輸入儲存體容器名稱的預留位置,以及儲存體帳戶名稱的預留位置。
az storage container create --name <name-for-your-container> --public-access off --account-name <your-storage-account>命令成功完成時,輸出會顯示
"created": true。

初始化 3D Scenes Studio 環境
現在您已設定好所有資源,您可以使用這些資源在 3D Scenes Studio 中建立環境。 在本節中,您將建立場景,並針對 Azure Digital Twins 執行個體中的範例圖形加以自訂。
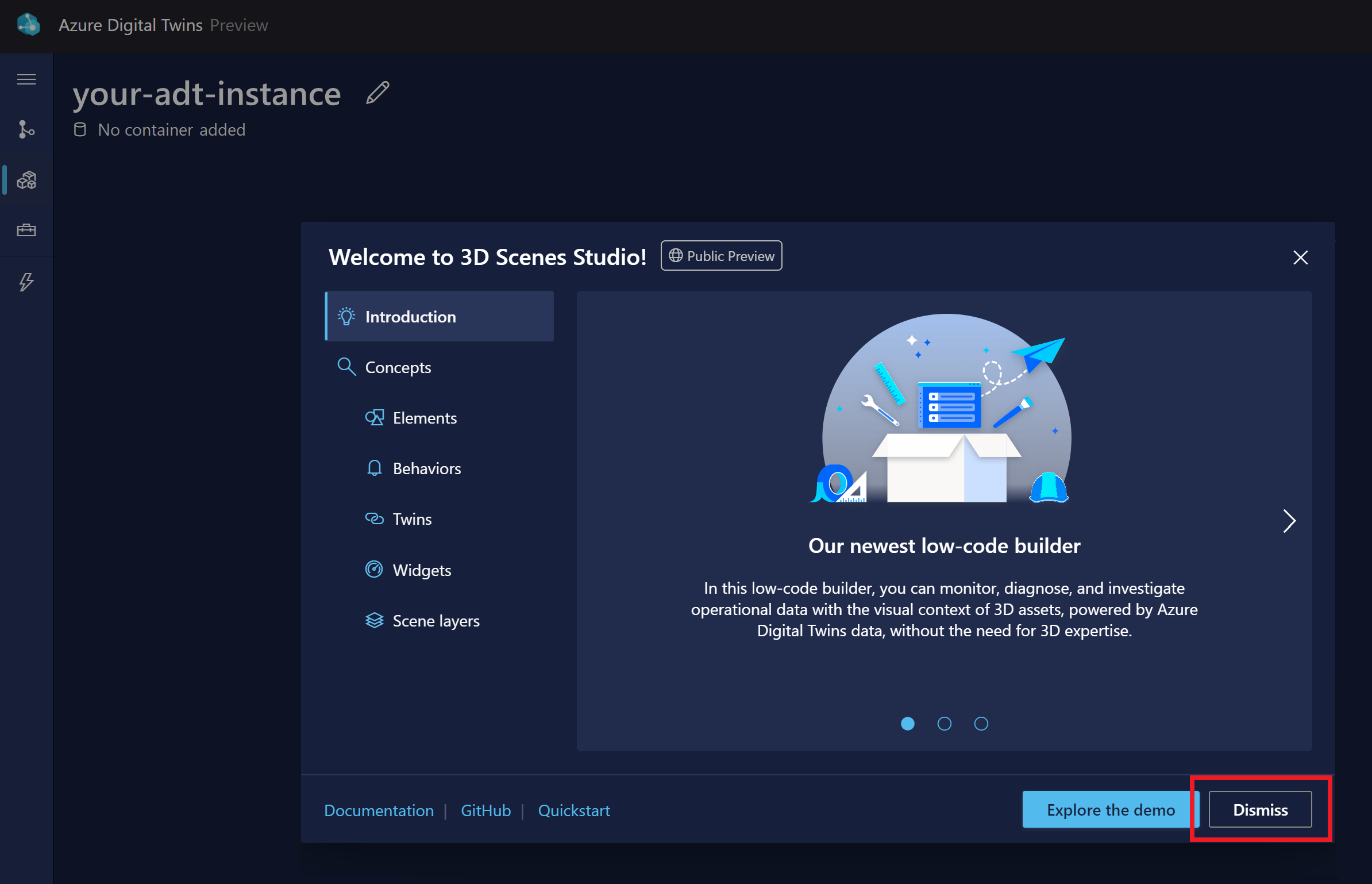
瀏覽至 3D Scenes Studio。 Studio 將會開啟,並連接到您上次在 Azure Digital Twins Explorer 中存取的 Azure Digital Twins 執行個體。 關閉歡迎使用示範。
選取執行個體名稱旁的 [編輯] 圖示,以設定執行個體和儲存體容器詳細資料。

針對 [Azure Digital Twins 執行個體 URL],將收集主機名稱步驟中的執行個體「主機名稱」填入至此 URL:
https://<your-instance-host-name>。針對 [Azure 儲存體帳戶 URL],將 [建立儲存體資源] 步驟中的儲存體帳戶名稱填入此 URL:
https://<your-storage-account>.blob.core.windows.net。針對 [Azure 儲存體容器名稱],請輸入 [建立儲存體資源] 步驟中的儲存體容器名稱。
選取儲存。
![3D Scenes Studio 的螢幕快照,其中醒目提示環境的 [儲存] 按鈕。](media/quickstart-3d-scenes-studio/studio-edit-environment-2.png)


![3D Scenes Studio 的螢幕快照,其中醒目提示環境的 [儲存] 按鈕。](media/quickstart-3d-scenes-studio/studio-edit-environment-2.png#lightbox)
新增 3D 場景
在本節中,您將使用您稍早在必要條件中下載的 RobotArms.glb 3D 模型檔案,來建立新的 3D 場景。 場景包含一個 3D 模型檔案,以及自動為您建立的一個設定檔。
此範例場景包含配送中心及其手臂的視覺效果。 您會將此視覺效果連接到您在產生範例模型和對應項步驟中建立的範例對應項,並在後續步驟中自訂資料驅動檢視。
選取 [新增 3D 場景] 按鈕以開始建立新的場景。 輸入場景的 [名稱] 和 [描述],然後選取[上傳檔案]。
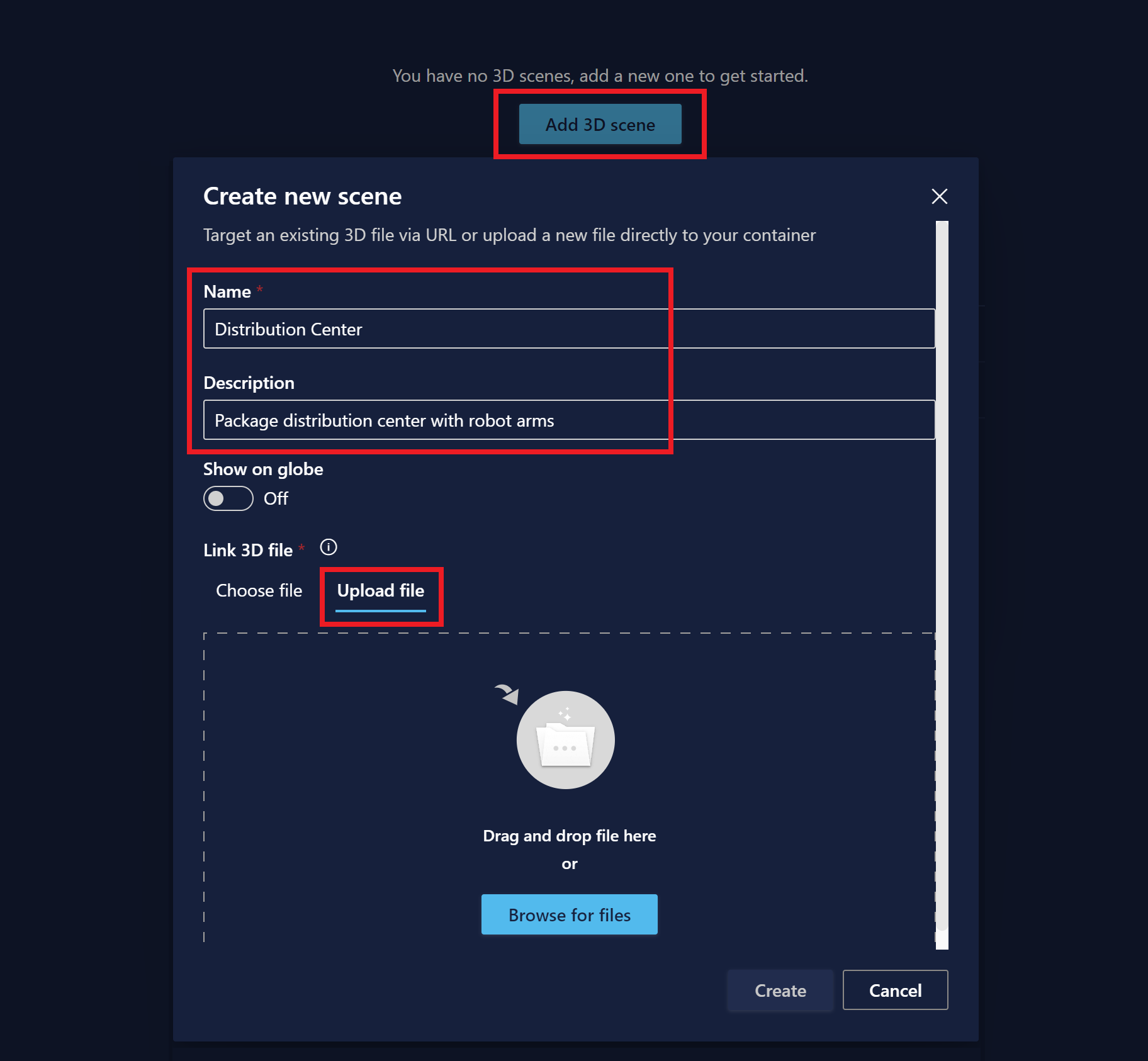
瀏覽您電腦上的 RobotArms.glb 檔案並加以開啟。 選取 建立。
![在 3D Scenes Studio 中建立新場景的螢幕快照。機器人武器檔案已上傳,並醒目提示 [建立] 按鈕。](media/quickstart-3d-scenes-studio/add-scene-create.png)
上傳檔案之後,您會看到它列在 3D Scenes Studio 的主畫面上。
選取要開啟的場景並加以檢視。 場景會在 [建置] 模式中開啟。


![在 3D Scenes Studio 中建立新場景的螢幕快照。機器人武器檔案已上傳,並醒目提示 [建立] 按鈕。](media/quickstart-3d-scenes-studio/add-scene-create.png#lightbox)

建立場景元素
接下來,您將在 3D 視覺效果中定義元素,並將其連結至您稍早設定的 Azure Digital Twins 圖表中的對應項。
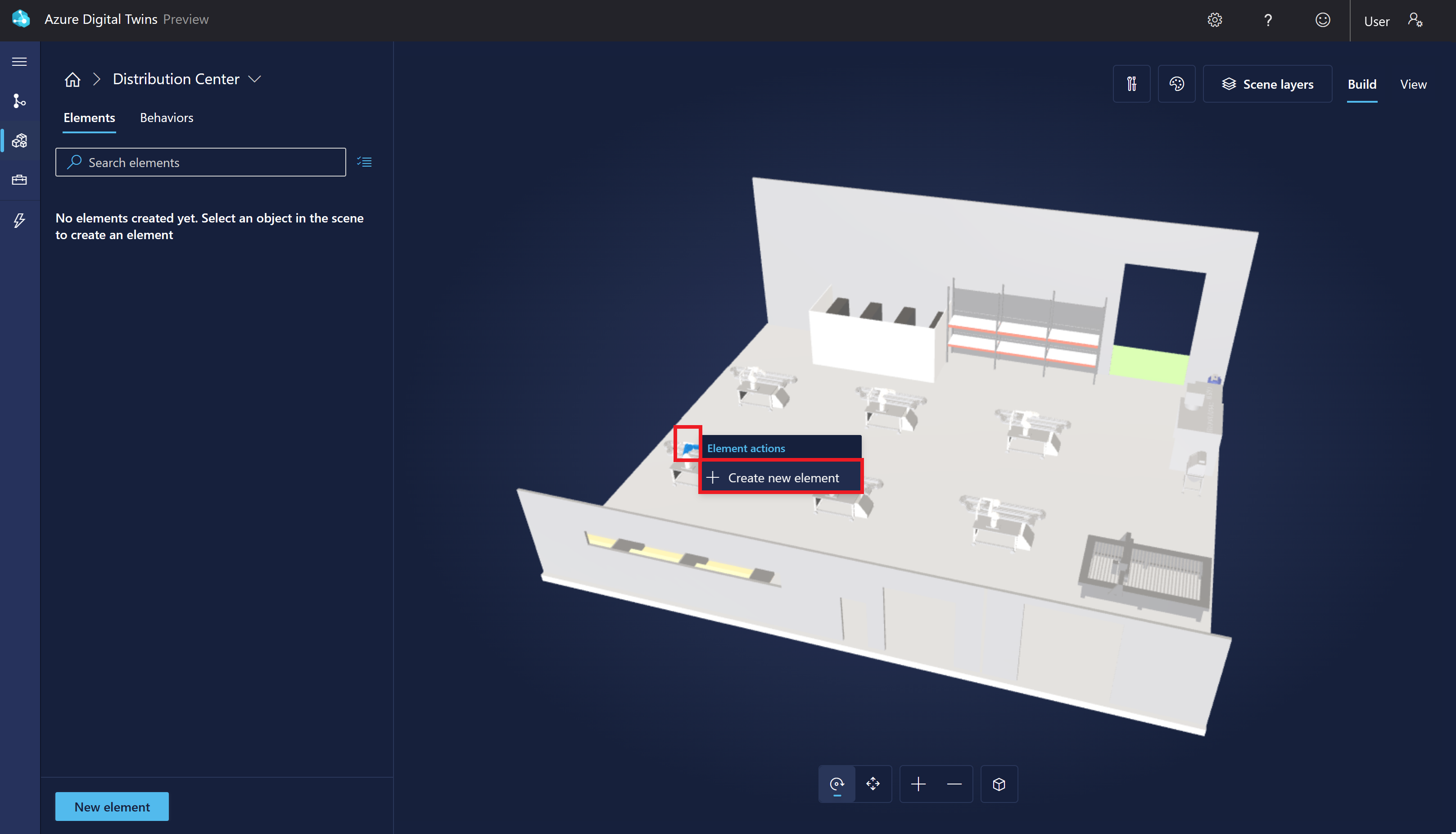
在場景視覺效果中選取任何機械手臂。 這麼做會顯示可能的元素動作。 選取 [+ 建立新的元素]。
在 [新增元素] 面板中,[主要對應項] 下拉式清單包含連線的 Azure Digital Twins 執行個體中所有對應項的名稱。
選取 Arm1。 這會自動將數位對應項識別碼 (
$dtId) 套用為元素名稱。選取 [建立元素]。
![3D Scenes Studio 中 [新增元素] 選項的螢幕快照。](media/quickstart-3d-scenes-studio/new-element-details.png)

![3D Scenes Studio 中 [新增元素] 選項的螢幕快照。](media/quickstart-3d-scenes-studio/new-element-details.png#lightbox)
元素現在會顯示在場景的元素清單中。
建立行為
接下來,您將建立元素的行為。 這些行為可讓您自訂元素的資料視覺效果和相關聯的商務邏輯。 然後,您可以探索這些資料視覺效果,以了解實體環境的狀態。
切換至 [行為] 清單,然後選取 [新增行為]。
![3D Scenes Studio 中 [新增行為] 按鈕的螢幕快照。](media/quickstart-3d-scenes-studio/new-behavior.png)
針對 [顯示名稱],輸入封裝線效率。 在 [元素] 下,選取 [Arm1]。
![3D Scenes Studio 中 [新增行為選項] 的螢幕快照,其中顯示 [元素] 選項。](media/quickstart-3d-scenes-studio/new-behavior-elements.png)
略過本快速入門中未使用的 [對應項] 索引標籤。
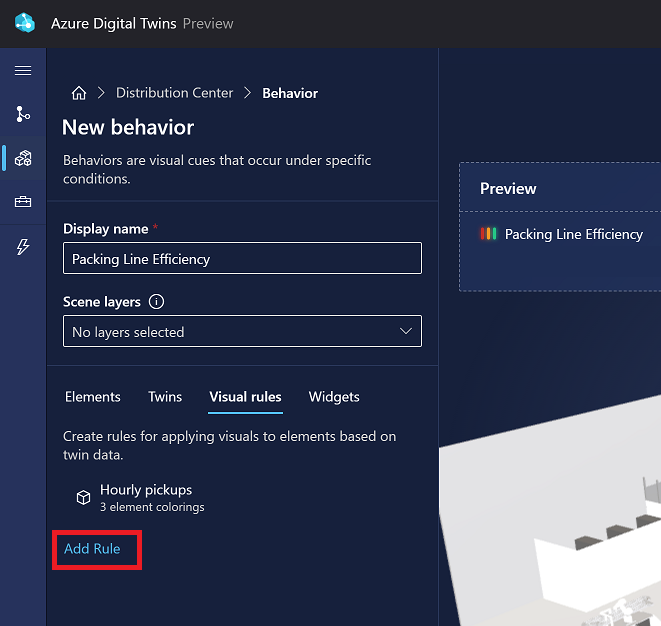
切換至 [視覺效果規則] 索引標籤。視覺效果規則 是元素上的資料驅動重疊,您可以設定來指出元素的健康情況或狀態。
首先,您將設定一些條件以指出包裝線的效率。
選取新增規則。
![3D Scenes Studio 中 [新增行為選項] 的螢幕快照,其中顯示 [視覺規則] 選項。](media/quickstart-3d-scenes-studio/new-behavior-visual-rules.png)
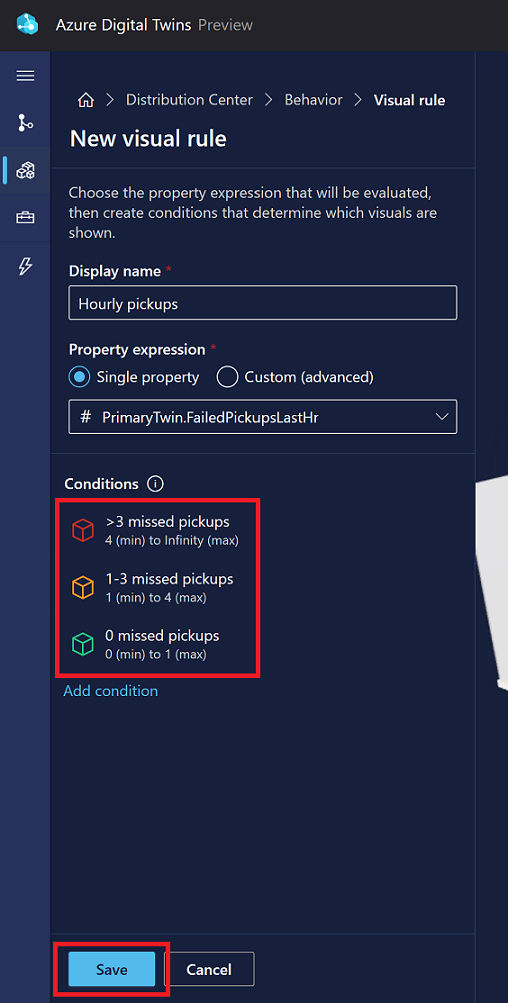
輸入 [每小時取貨] 的 [顯示名稱]。 將屬性運算式保持在單一屬性上,然後開啟屬性下拉式清單。 它包含 Arm1 元素主要對應項上所有屬性的名稱。 選取 PrimaryTwin.FailedPickupsLastHr。 然後,選取 [新增條件]。
![3D Scenes Studio 中 [新增行為選項] 的螢幕快照,其中顯示 [新增視覺規則] 選項。](media/quickstart-3d-scenes-studio/new-behavior-visual-rules-2.png)
接下來,您將定義一些界限,以指出每小時取貨何時遺漏過多包裹。 在此案例中,假設某個手臂在一小時內遺漏超過三次取貨,則需要特別注意。 將條件標籤為 [遺漏取貨 3 次]>,並定義介於 4 與 無限 之間的值範圍(包含最小範圍值,不包含最大值)。 指派紅色的 元素著色。 選取儲存。
![3D Scenes Studio 中 [新增條件] 選項的螢幕快照,其中建立著色條件。](media/quickstart-3d-scenes-studio/new-behavior-visual-rules-3.png)
再次選取 [新增條件],然後建立一個標籤為 [遺漏取貨 1-3 次] 的條件。 定義介於 1 與 4 之間的值範圍,並指派橙色的 元素著色。 儲存條件。
再次選取 [新增條件],然後建立一個標籤為 [遺漏取貨 0 次] 的條件。 定義介於 0 和 1 之間的值範圍,並指派綠色的 元素著色。 儲存條件。
建立這三個條件之後,儲存 新的視覺規則。
接下來,再建立一個視覺規則,以顯示遺漏包裹的警示。
從 [Visual rules] 索引標籤中,再次選取 [新增規則]。
輸入 [PickupFailedAlert] 的 [顯示名稱]。 將 屬性運算式 變更為 [自訂 (進階)],輸入 primaryTwin.PickupFailedAlert 屬性,並將 類型 設定為 [布林值]。 這是 ARM 對應項上的布林值屬性,在包裹取貨失敗時設定為 [True]。 選取 [新增條件]。
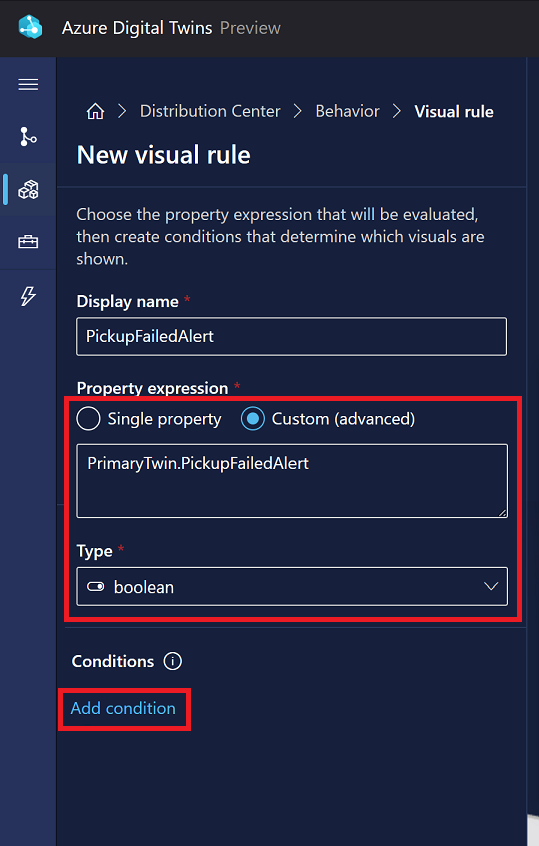
輸入 ${PrimaryTwin.PickupFailedBoxID} 的 標籤 失敗。 稍後,在場景檢視中,這會動態顯示 ARM 對應項字串屬性的值 PickupFailedBoxID,它會包含一個識別碼,代表手臂最近未能取貨的盒子。 將 [值] 設定為 [True],然後選擇 [徽章] 的 [視覺效果類型]。 將 [色彩] 設定為紅色,然後選擇 [圖示]。 選取儲存。
![3D Scenes Studio 中建立徽章條件之 [新增條件] 選項的螢幕快照。](media/quickstart-3d-scenes-studio/new-behavior-visual-rules-badge-3.png)
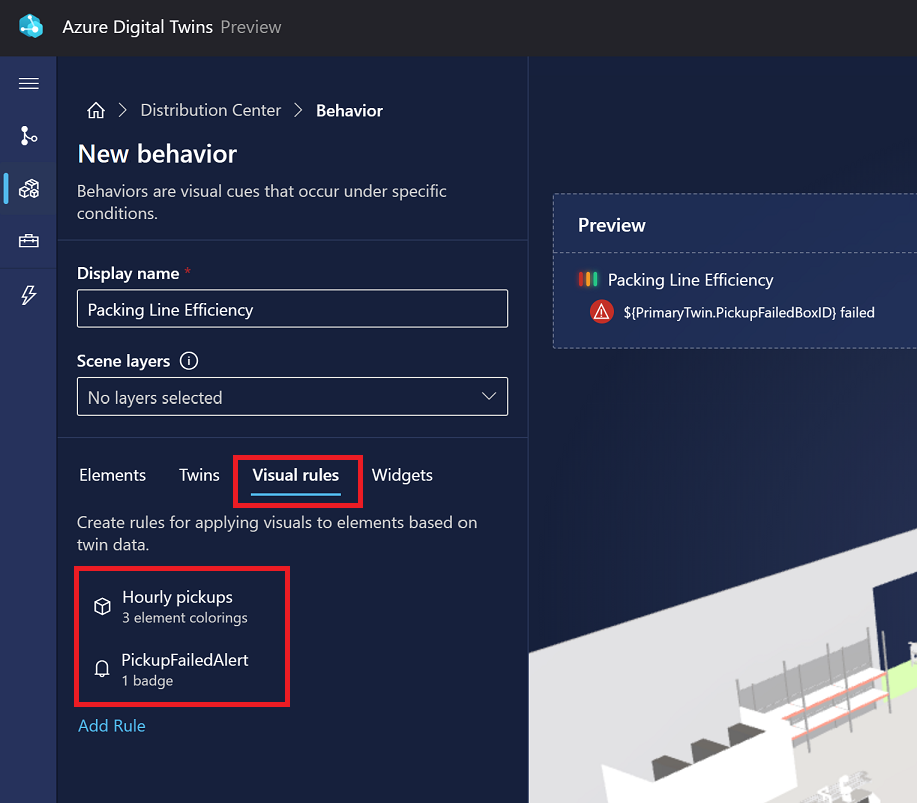
您現在應該會看到這兩個規則列在 [視覺效果規則] 索引標籤中。
切換至 [小工具] 索引標籤。小工具是提供其他內容和資料的資料驅動視覺效果,可協助您了解行為所代表的案例。 在這裡,您將新增兩個視覺化小工具來顯示手臂元素的屬性資訊。
首先,建立小工具以顯示手臂的液壓值量測計。
選取 [新增小工具]。
![3D Scenes Studio 中 [新增行為] 選項的螢幕快照,其中顯示小工具選項。](media/quickstart-3d-scenes-studio/new-behavior-widgets.png)
從 [小工具程式庫],選取 [量測計] 小工具,然後選取 [新增小工具]。
在 [新增小工具] 選項中,新增「液壓」的 [顯示名稱]、m/s 的 [測量單位] 和 PrimaryTwin.HydraulicPressure 的單一屬性 [屬性運算式]。
設定三個值範圍,讓值 0-40 以一個色彩顯示,40-80 以第二個色彩顯示,而 80-無限以第三個色彩顯示 (請記住,範圍最小值為包含,而最大值則為排除)。
![適用於量測計小工具之 3D Scenes Studio 中 [新增小工具] 選項的螢幕快照。](media/quickstart-3d-scenes-studio/new-widget-gauge.png)
選取 [建立小工具]。
接下來,建立具有手臂的即時相機串流連結的小工具。
選取 [新增小工具]。 從 [小工具程式庫],選取 [連結] 小工具,然後選取 [新增小工具]。
在 [新增小工具] 選項中,輸入即時手臂相機的標籤。 針對 [URL],您可以使用範例 URL http://contoso.armstreams.com/${PrimaryTwin.$dtId}。 此範例的 URL 並未裝載即時相機,但該連結可呈現影片摘要於真實案例可能裝載的位置。
選取 [建立小工具]。
![3D Scenes Studio 中連結小工具之 [新增小工具] 選項的螢幕快照。](media/quickstart-3d-scenes-studio/new-widget-link.png)
行為選項現在已完成。 選取 [建立行為] 以儲存該行為。
![3D Scenes Studio 中 [新增行為] 選項的螢幕快照,其中醒目提示 [建立行為]。](media/quickstart-3d-scenes-studio/new-behavior-create.png)
![3D Scenes Studio 中 [新增行為] 按鈕的螢幕快照。](media/quickstart-3d-scenes-studio/new-behavior.png#lightbox)
![3D Scenes Studio 中 [新增行為選項] 的螢幕快照,其中顯示 [元素] 選項。](media/quickstart-3d-scenes-studio/new-behavior-elements.png#lightbox)
![3D Scenes Studio 中 [新增行為選項] 的螢幕快照,其中顯示 [視覺規則] 選項。](media/quickstart-3d-scenes-studio/new-behavior-visual-rules.png#lightbox)
![3D Scenes Studio 中 [新增行為選項] 的螢幕快照,其中顯示 [新增視覺規則] 選項。](media/quickstart-3d-scenes-studio/new-behavior-visual-rules-2.png#lightbox)
![3D Scenes Studio 中 [新增條件] 選項的螢幕快照,其中建立著色條件。](media/quickstart-3d-scenes-studio/new-behavior-visual-rules-3.png#lightbox)


![3D Scenes Studio 中 [新增行為] 選項的螢幕快照,其中顯示小工具選項。](media/quickstart-3d-scenes-studio/new-behavior-widgets.png#lightbox)
![適用於量測計小工具之 3D Scenes Studio 中 [新增小工具] 選項的螢幕快照。](media/quickstart-3d-scenes-studio/new-widget-gauge.png#lightbox)
![3D Scenes Studio 中連結小工具之 [新增小工具] 選項的螢幕快照。](media/quickstart-3d-scenes-studio/new-widget-link.png#lightbox)
![3D Scenes Studio 中 [新增行為] 選項的螢幕快照,其中醒目提示 [建立行為]。](media/quickstart-3d-scenes-studio/new-behavior-create.png#lightbox)
封裝線效率行為現在將顯示在場景的行為清單中。
檢視場景
到目前為止,您都是在 [建置] 模式中使用 3D Scenes Studio。 現在,將模式切換至 [檢視]。
![3D Scenes Studio 中原廠場景的螢幕快照,其中醒目提示 [檢視模式] 按鈕。](media/quickstart-3d-scenes-studio/distribution-scene-view-1.png#lightbox)
從 [元素] 清單中,選取您建立的 Arm1 元素。 視覺效果會放大以顯示視覺效果元素,並顯示您為其設定的行為。

將行為套用至其他元素
有時候,環境可能包含多個類似的元素,其在視覺效果中的顯示方式應該都類似 (如本範例中的六個不同的機械手臂)。 既然您已為一個手臂建立行為,並確認它在檢視器中的外觀,本節將說明如何快速將該行為新增至其他手臂,使得它們會在檢視器中顯示相同類型的資訊。
回到 [建置] 模式。 正如同您在建立場景元素中所做,在視覺效果中選取不同的手臂,然後選取 [建立新元素]。

針對新元素選取 [Arm2] 的 [主要對應項],然後切換至 [行為] 索引標籤。
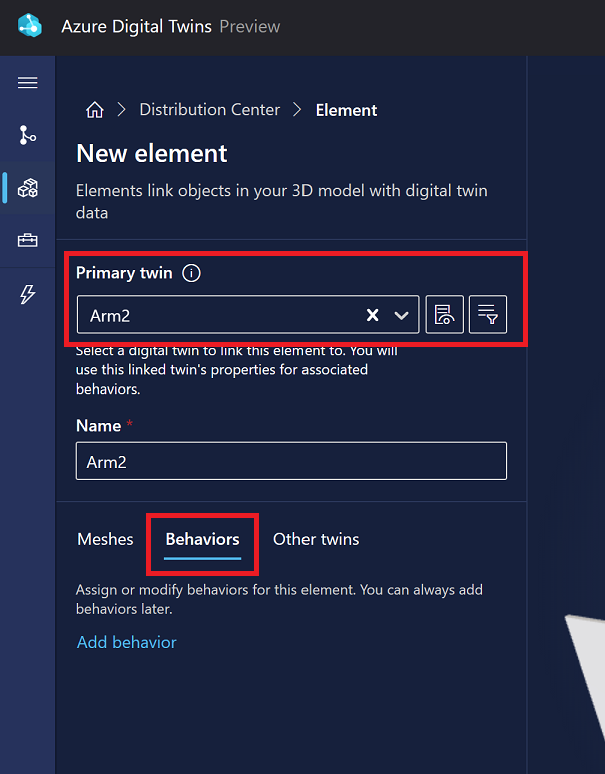
選取 [新增行為]。 選擇您在本快速入門中建立的封裝線效率行為。
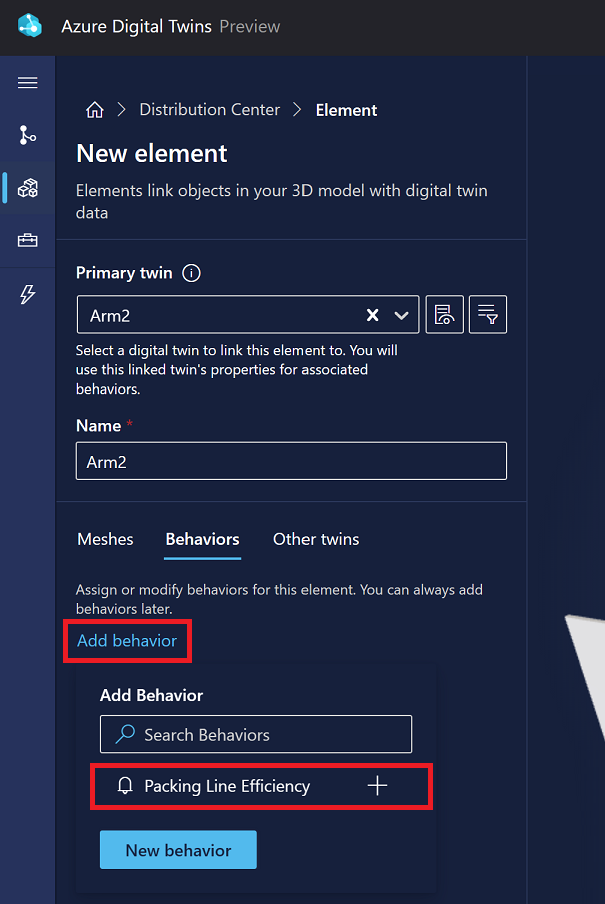
選取 [建立元素] 以完成建立新的手臂元素。



切換至 [檢視] 索引標籤,以查看新手臂元素上的行為。 您建立行為時選取的所有資訊現在都可供場景中的這兩個手臂元素使用。

提示
如果想要,您可以重複本節中的步驟來為其餘四個手臂建立元素,並將行為套用至所有元素,讓視覺效果完整。
檢閱和情境化學習
本快速入門說明如何為 Azure Digital Twins 資料建立沉浸式儀表板,以便與終端使用者共用,並提升對您的真實世界環境重要的深入解析的存取。
在快速入門中,您已建立範例 3D 場景,以呈現具有的機械手臂可揀取封裝的封裝配送中心。 此視覺效果已連線到數位對應項圖表,而且您已將視覺效果中的手臂連結到它自己提供備份資料的特定數位對應項。 您也建立了視覺行為,以在檢視完整場景時顯示該手臂的重要資訊,包括該手臂在過去一小時內失敗的方塊揀取。
在本快速入門中,使用 Azure Digital Twins 資料模擬器快速為您建立了工廠案例的範例模型和對應項。 使用 Azure Digital Twins 搭配您自己的環境時,您將建立自己的模型和對應項,以準確地詳述環境的元素。 本快速入門也使用資料模擬器來模擬在封裝遺漏時,驅動數位對應項屬性更新的「即時」資料。 使用 Azure Digital Twins 搭配您自己的環境時,擷取即時資料是一項程序,您會根據自己的環境感應器自行設定。
清除資源
若要在此快速入門之後清理,請根據您要下一步執行的動作,選擇您要移除的 Azure Digital Twins 資源。
- 如果您打算繼續進行 Azure Digital Twins 教學課程,您可以將本快速入門中的執行個體重複用於這些文章,因此您不需要將其移除。
如果您想要繼續使用本文中的 Azure Digital Twins 執行個體,但清除其所有模型、對應項和關聯性,請執行下列 az dt job deletion CLI 命令:
az dt job deletion create -n <name-of-Azure-Digital-Twins-instance> -y如果您只想要刪除部分元素,可以使用 az dt twin relationship delete、az dt twin delete 和 az dt model delete 命令,選擇性地僅刪除您想要移除的元素。
如果您不再需要您的 Azure Digital Twins 執行個體,可以使用 Azure 入口網站將其刪除。
在入口網站中瀏覽回執行個體的 [概觀] 頁面。 (如果您已關閉該索引標籤,可以在 Azure 入口網站搜尋列中再次搜尋該執行個體的名稱,然後從搜尋結果中選取它。)
選取 [刪除] 以刪除執行個體,包括其所有模型和對應項。
![Azure 入口網站 中 Azure Digital Twins 實例的 [概觀] 頁面螢幕快照。[刪除] 按鈕會反白顯示。](media/quickstart-azure-digital-twins-explorer/delete-instance.png)
您可以在 Azure 入口網站中瀏覽至您的儲存體帳戶的 [概觀] 頁面,然後選取 [刪除],以刪除您的儲存體資源。 這麼做會刪除該儲存體帳戶及其內的容器,以及容器中的 3D 場景檔案。
![Azure 入口網站 中 Azure 記憶體帳戶 [概觀] 頁面的螢幕快照。[刪除] 按鈕會反白顯示。](media/quickstart-3d-scenes-studio/delete-storage.png)
您也可能想要從本機電腦刪除下載的範例 3D 檔案。
下一步
接下來,請繼續進行 Azure Digital Twins 教學課程,以建立您自己的 Azure Digital Twins 環境。