基于围栏的资源管理
演示如何利用通过围栏跟踪 GPU 进度来管理资源数据的生存期。 可有效地重复使用内存,用围栏来仔细管理内存中可用空间的可用性,例如针对“上传”堆环形缓冲区实现。
环形缓冲区方案
下面的示例展示了一个应用罕见地需要使用“上传”堆内存。
管理上传堆的一种方法是环形缓冲区。 环形缓冲区会保存下几帧所需的数据。 应用会维护当前数据输入指针和帧偏移量队列,用于记录每一帧和该帧资源数据的起始偏移量。
应用会基于缓冲区创建环形缓冲区,针对每个帧将数据上传到 GPU。 目前第 2 帧已呈现,环形缓冲区将第 4 帧的数据包含在内,第 5 帧所需的全部数据均已显示,第 6 帧所需的大型常量缓冲区需要进行二次分配。
图 1:应用尝试为常量缓冲区进行二次分配,但发现可用内存不足。
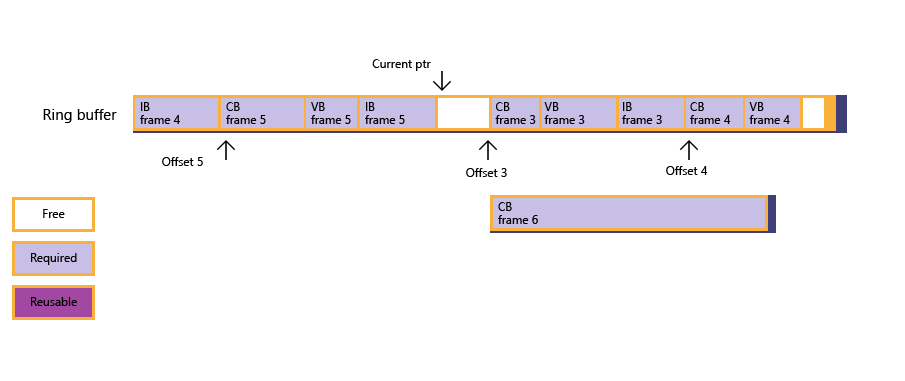
图 2:通过围栏轮询,应用发现第 3 帧已呈现,帧偏移量队列随后已更新,环形缓冲区的当前状态也随之更新;然而,空闲内存仍不足以无法容纳常量缓冲区。

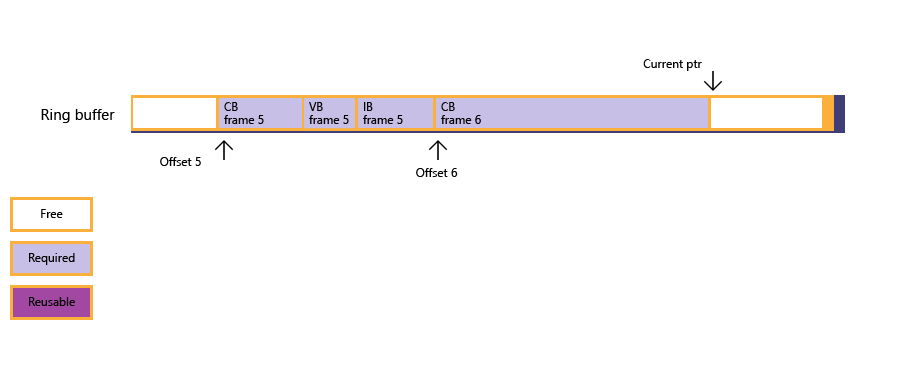
图 3:鉴于情况,CPU 阻止自身(通过栅栏等待),直到第 4 帧呈现,这释放了次级分配给第 4 帧的内存。

图 4:现在,空闲内存已足以容纳常量缓冲区,且二次分配成功;应用将大型常量缓冲区数据复制到之前由第 3 帧和第 4 帧的资源数据所占用的内存中。 最后更新当前输入指针。
如果应用实现了环形缓冲区,则该缓冲区必须足够大,以应对资源数据大小最糟糕的情况。
环形缓冲区示例
以下示例代码显示了如何管理环形缓冲区,请注意处理围栏轮询和等待的二次分配例程。 为简单起见,此示例使用 NOT_SUFFICIENT_MEMORY 来隐藏“在堆中找到的可用内存不足”的详细信息,因为基于 FrameOffsetQueue) 内的m_pDataCur和偏移量的逻辑 (与堆或围栏没有紧密关系。 简化了示例,牺牲的是帧速率而不是内存利用率。
请注意,环缓冲区支持有望成为常用方案;但是,堆设计并不排除其他用途,比如命令列表参数化和重用。
struct FrameResourceOffset
{
UINT frameIndex;
UINT8* pResourceOffset;
};
std::queue<FrameResourceOffset> frameOffsetQueue;
void DrawFrame()
{
float vertices[] = ...;
UINT verticesOffset = 0;
ThrowIfFailed(
SetDataToUploadHeap(
vertices, sizeof(float), sizeof(vertices) / sizeof(float),
4, // Max alignment requirement for vertex data is 4 bytes.
verticesOffset
));
float constants[] = ...;
UINT constantsOffset = 0;
ThrowIfFailed(
SetDataToUploadHeap(
constants, sizeof(float), sizeof(constants) / sizeof(float),
D3D12_CONSTANT_BUFFER_DATA_PLACEMENT_ALIGNMENT,
constantsOffset
));
// Create vertex buffer views for the new binding model.
// Create constant buffer views for the new binding model.
// ...
commandQueue->Execute(commandList);
commandQueue->AdvanceFence();
}
HRESULT SuballocateFromHeap(SIZE_T uSize, UINT uAlign)
{
if (NOT_SUFFICIENT_MEMORY(uSize, uAlign))
{
// Free up resources for frames processed by GPU; see Figure 2.
UINT lastCompletedFrame = commandQueue->GetLastCompletedFence();
FreeUpMemoryUntilFrame( lastCompletedFrame );
while ( NOT_SUFFICIENT_MEMORY(uSize, uAlign)
&& !frameOffsetQueue.empty() )
{
// Block until a new frame is processed by GPU, then free up more memory; see Figure 3.
UINT nextGPUFrame = frameOffsetQueue.front().frameIndex;
commandQueue->SetEventOnFenceCompletion(nextGPUFrame, hEvent);
WaitForSingleObject(hEvent, INFINITE);
FreeUpMemoryUntilFrame( nextGPUFrame );
}
}
if (NOT_SUFFICIENT_MEMORY(uSize, uAlign))
{
// Apps need to create a new Heap that is large enough for this resource.
return E_HEAPNOTLARGEENOUGH;
}
else
{
// Update current data pointer for the new resource.
m_pDataCur = reinterpret_cast<UINT8*>(
Align(reinterpret_cast<SIZE_T>(m_pHDataCur), uAlign)
);
// Update frame offset queue if this is the first resource for a new frame; see Figure 4.
UINT currentFrame = commandQueue->GetCurrentFence();
if ( frameOffsetQueue.empty()
|| frameOffsetQueue.back().frameIndex < currentFrame )
{
FrameResourceOffset offset = {currentFrame, m_pDataCur};
frameOffsetQueue.push(offset);
}
return S_OK;
}
}
void FreeUpMemoryUntilFrame(UINT lastCompletedFrame)
{
while ( !frameOffsetQueue.empty()
&& frameOffsetQueue.first().frameIndex <= lastCompletedFrame )
{
frameOffsetQueue.pop();
}
}
相关主题