练习 - 使用求解器创建智能对象放置
求解器是混合现实工具包 (MRTK) 的组件之一。 我们来了解一下两种类型的求解器及其各自的功能。
求解器在 MRTK 中的位置
MRTK 的求解器位于 MRTK SDK 文件夹中。 若要查看项目中可用的求解器,请在“项目”窗口中转到“包”>“MRTK 空间操作”>求解器。

方向指示器求解器
使用方向指示器求解器将用户定向到对象。 以下是操作方法:
在“项目”窗口中,转到“资产”>“MRTK.Tutorials.GettingStarted”>“Prefab”。 将 Chevron 预制件拖到“层次结构”窗口,并将其转换位置设置为 X = 0, Y = 1.5, Z = 2,以将其放置在 RoverExplorer 对象旁边。
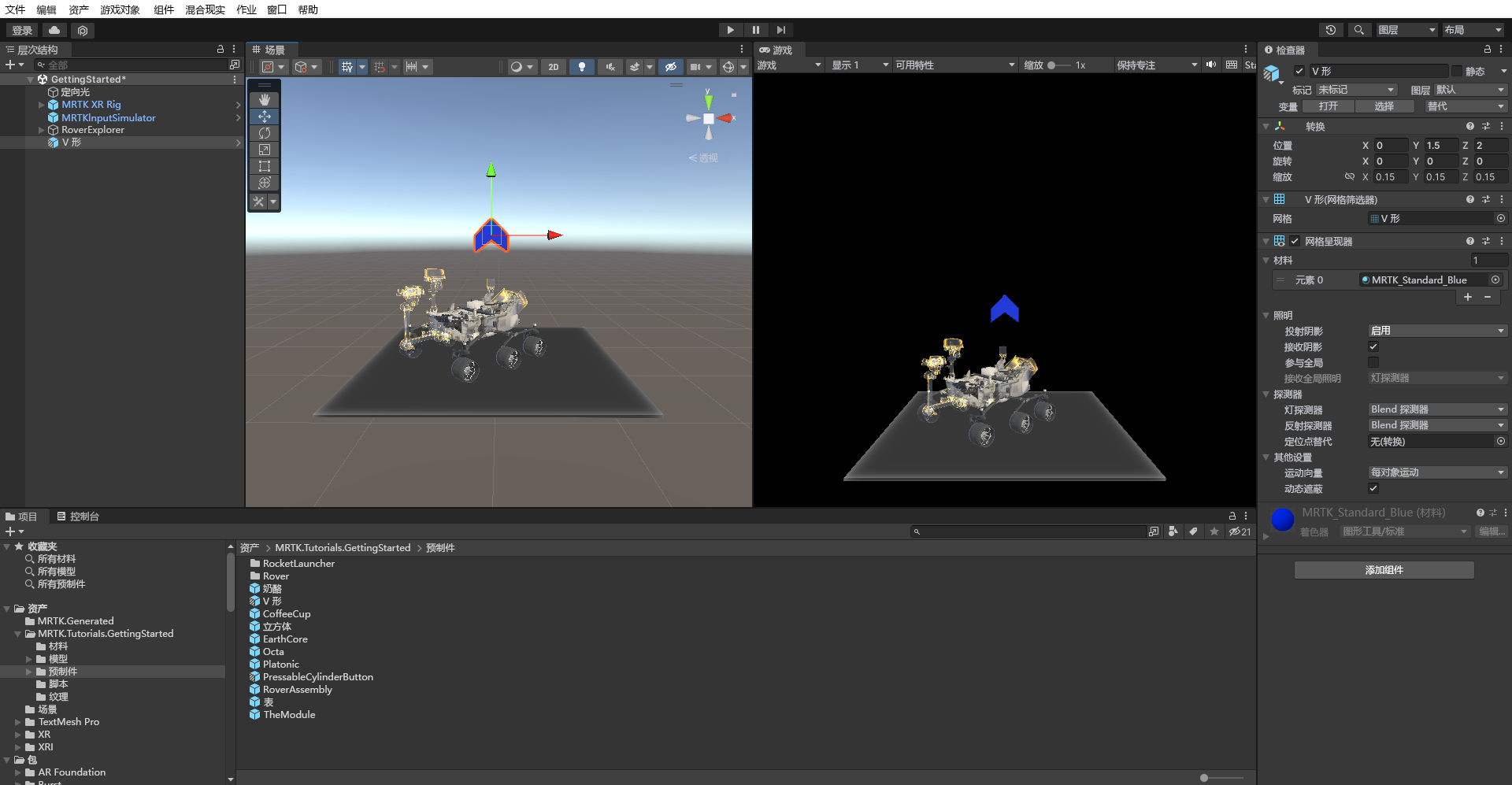
将新添加的 Chevron 对象重命名为“Indicator”。 然后,在“检查器”窗口中,选择“添加组件”以添加“DirectionalIndicator”。

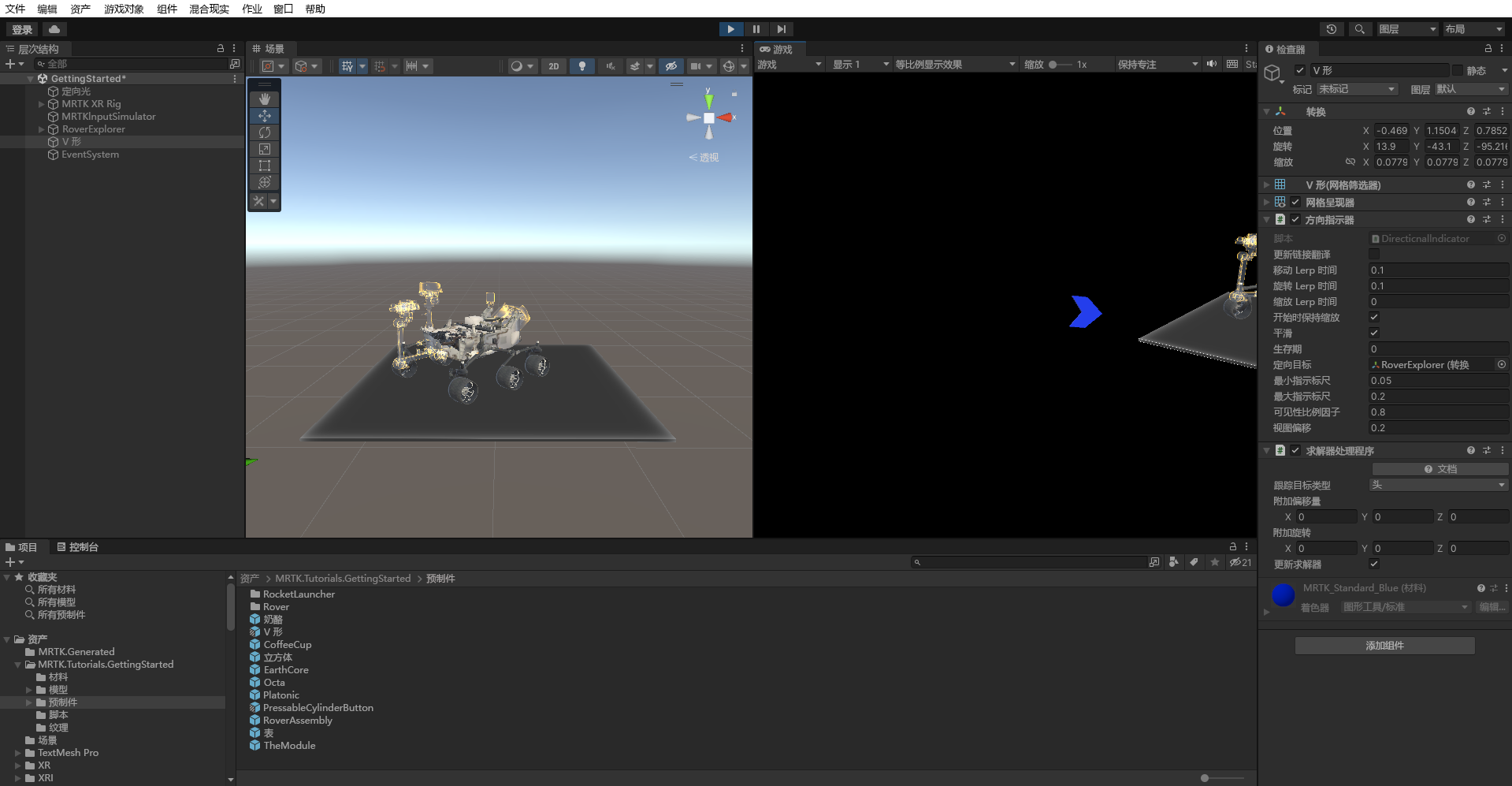
按如下所示配置“DirectionalIndicator”和“SolverHandler”组件:
a. 验证“SolverHandler”组件的“跟踪目标类型”是否设置为“头部”。
b. 通过将“RoverExplorer”从“层次结构”拖到“无(转换)”字段,将其分配给“DirectionalIndicator”组件的“方向目标”。
c. 将“视图偏移”更改为“0.2”。

要进入“游戏”模式,请按“播放”。 按住鼠标右键,同时向左或向右移动鼠标以旋转注视方向。
请注意,当你将视线从 RoverExplorer 对象移开时,Indicator 对象将出现并指向 RoverExplorer 对象。



点击以放置求解器
使用点击以放置求解器来重新定位对象。 以下是操作方法:
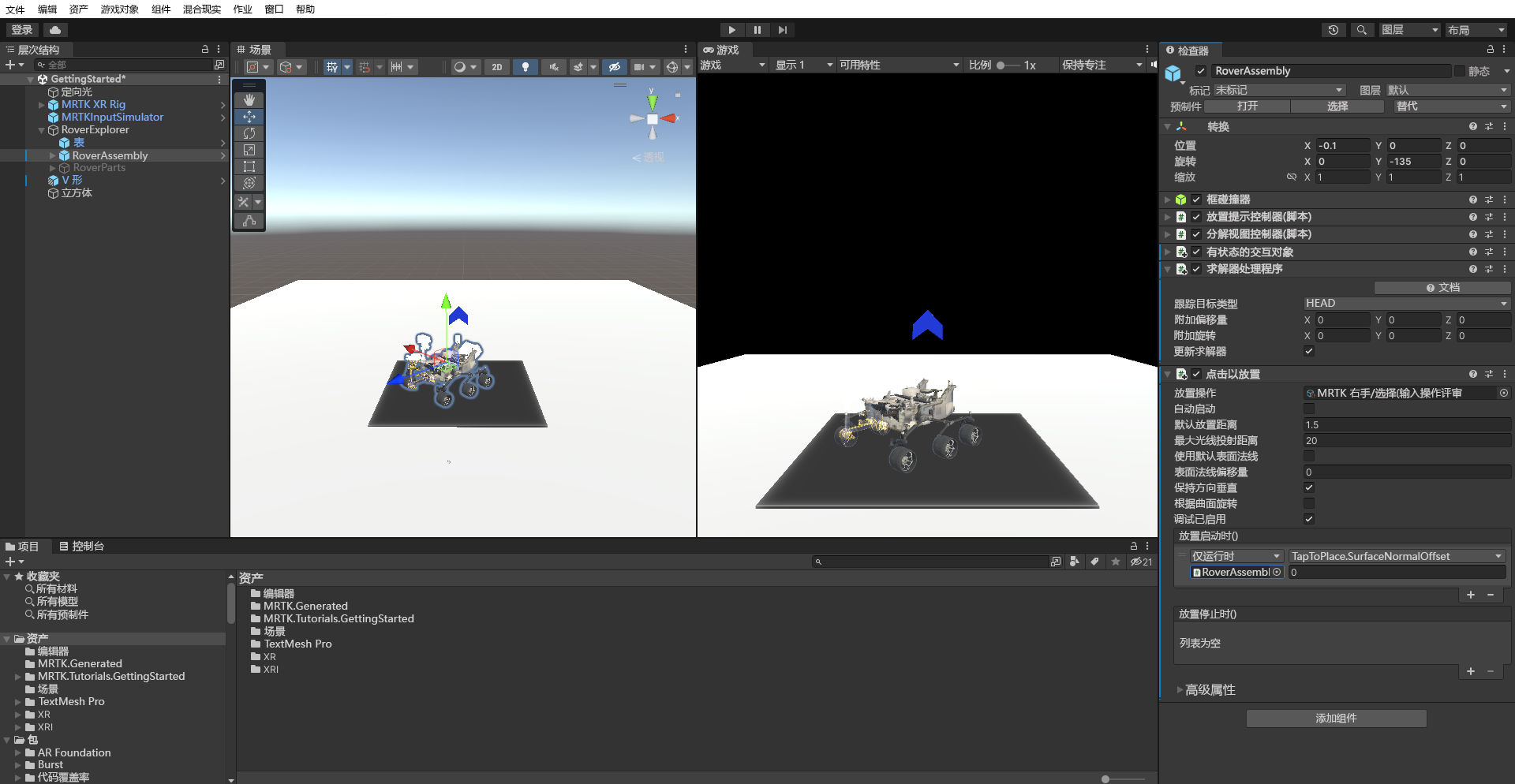
在“层次结构”窗口中,选择“RoverExplorer”>“RoverAssembly”对象。 然后,在“检查器”中,使用“添加组件”添加“点击以放置”组件。 按如下所示配置组件:
a. 验证“SolverHandler”组件的“跟踪目标类型”是否设置为“头部”。
b. 取消选中“使用默认表面法线偏移”,并确保“表面法线偏移”设置为 0。
c. 选中“保持方向垂直”复选框。

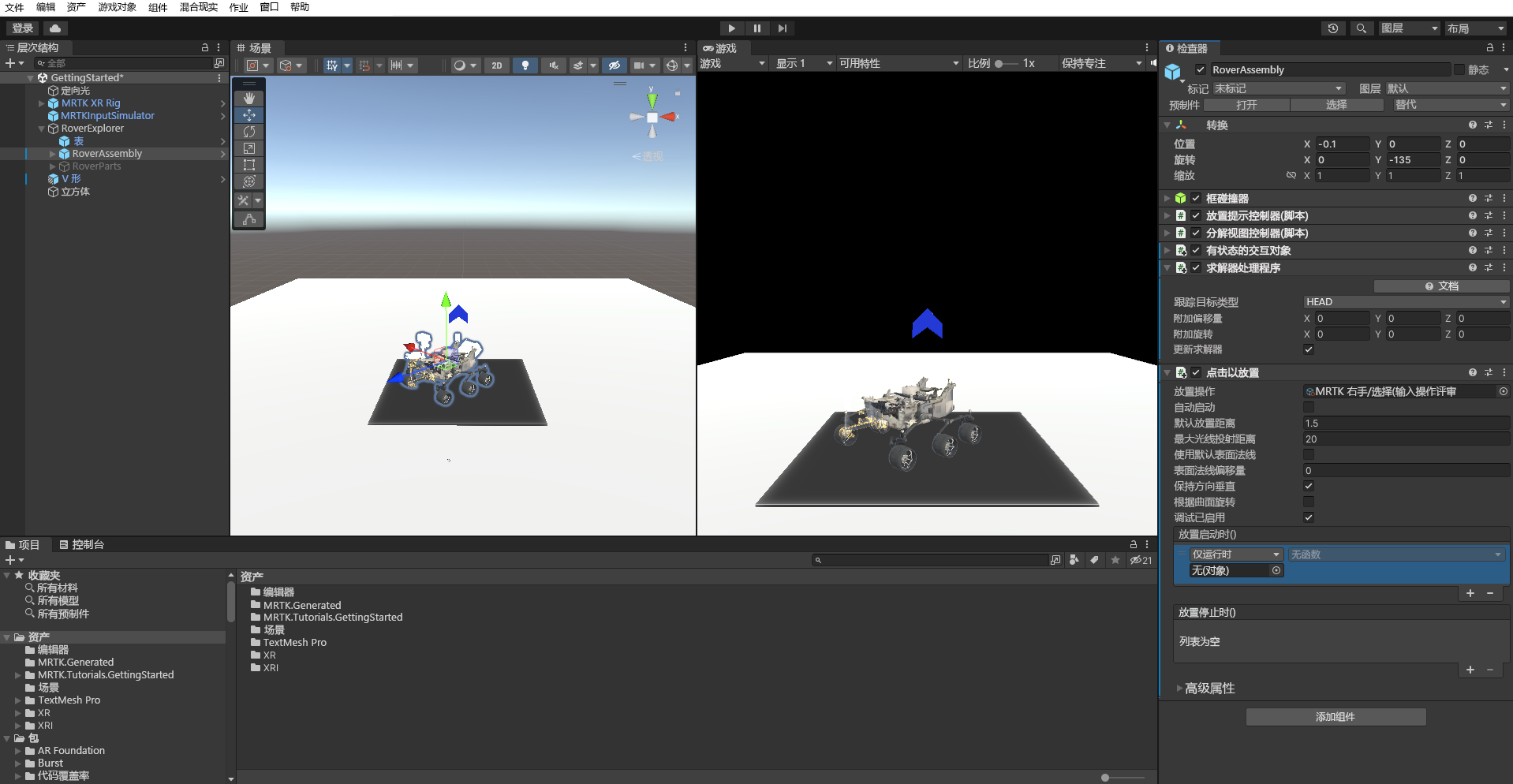
接下来,使用“添加组件”来添加“有状态交互”组件。 在“检查器”窗口中,找到“On Clicked ()”事件。 选择“+”图标以添加新事件。 按如下所示配置事件:
a. 通过将 RoverAssembly 对象从“层次结构”拖到“无(对象)”字段,将其指定为侦听器的“On Clicked ()”事件。
b. 从“非功能”下拉列表中,选择“TapToPlace”>“StartPlacement()”,以便在触发事件时调用此方法。
在“层次结构”窗口中的“RoverAssembly”对象仍处于选中状态的情况下,在“检查器”窗口中查找“On Placing Started ()”事件。 选择“+”图标以添加新事件。
按如下所示配置事件:
a. 通过将“RoverAssembly”对象从“层次结构”拖到“无(对象)”字段,将其指定为侦听器的“On Placeing Started ()”事件。
b. 从“无函数”下拉列表中,选择“TapToPlace”>float SurfaceNormalOffset”,以在触发事件时更新“SurfaceNormalOffset”属性值。
c. 验证参数是否设置为“0”。
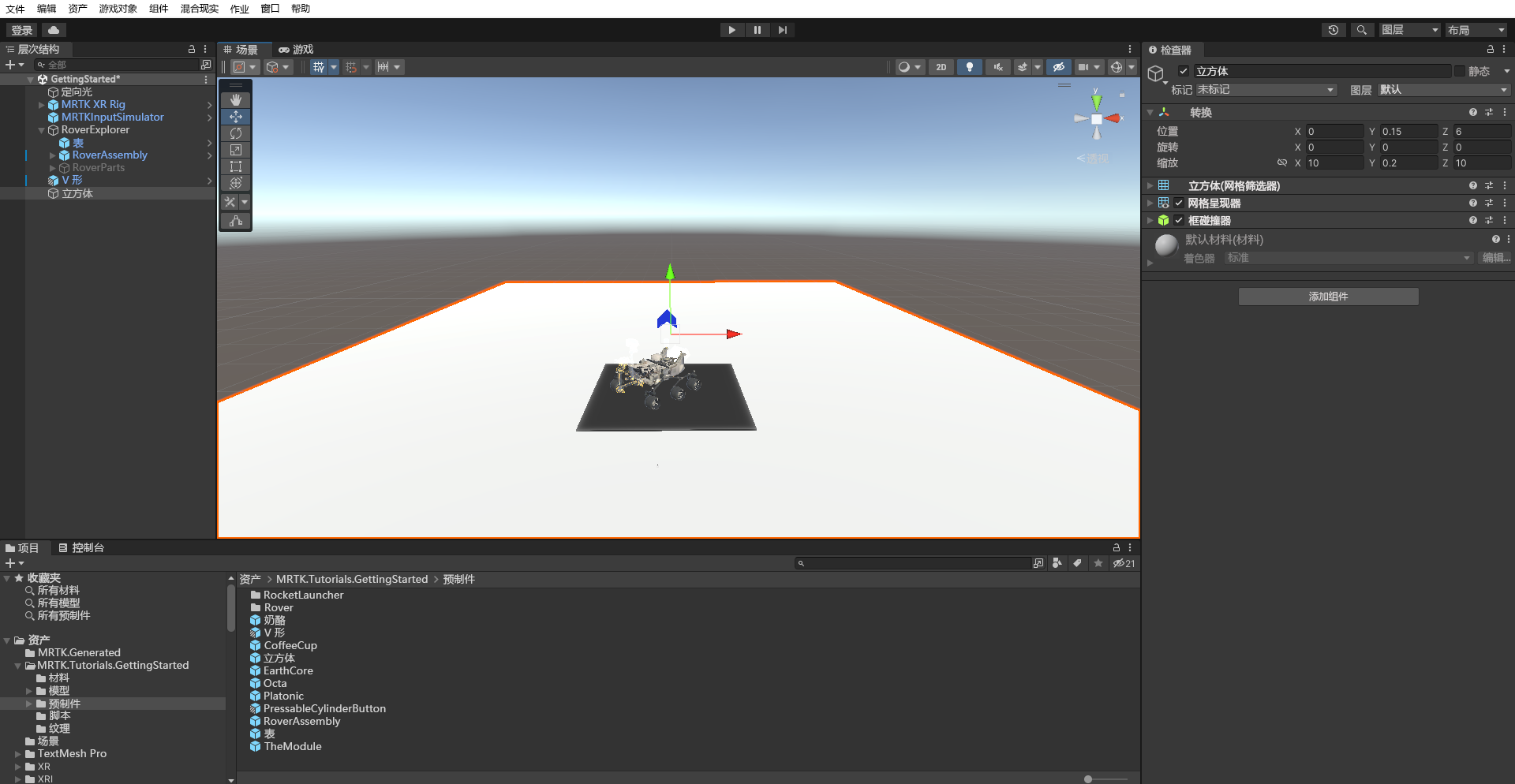
在“层次结构”中,右键单击某个空白处。 选择“3D 对象”>“立方体”以创建一个代表地面的临时对象,并按如下所示配置“转换”组件:
- 位置:X = 0, Y = 0.15, Z = 6
- 旋转:X = 0, Y = 0, Z = 0
- 缩放:X = 10, Y = 0.2, Z = 10
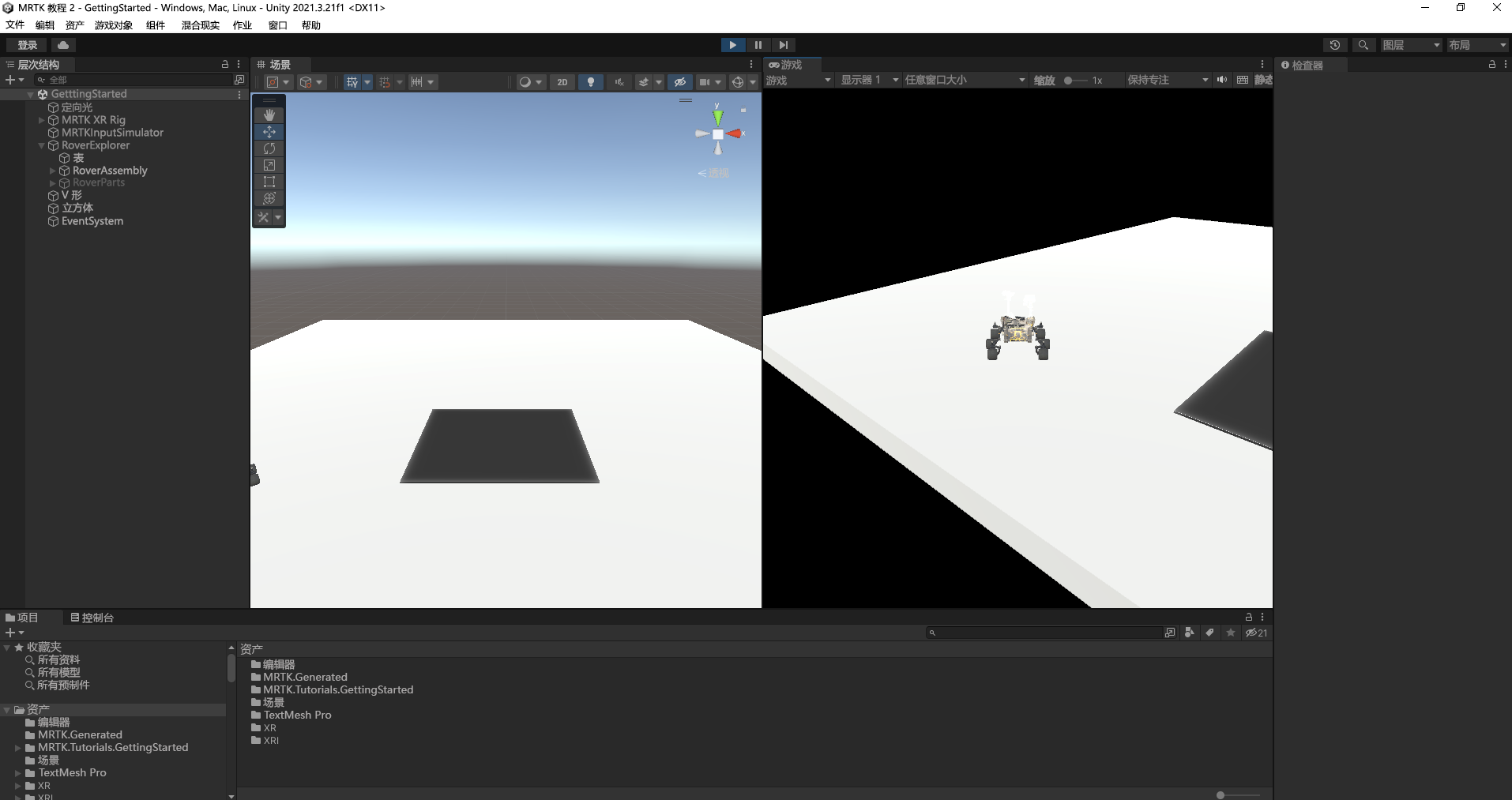
要进入“游戏”模式,请按“播放”。 然后按住鼠标右键,同时向下移动鼠标,直到看到“RoverAssembly”对象为止。

按住空格键并单击鼠标左键进行隔空敲击,然后开始点击以放置过程。

按住鼠标右键,同时向左或向右移动鼠标以旋转注视方向。 如果对放置感到满意,请按住空格键并单击鼠标左键,执行隔空敲击以结束放置。
在“游戏”模式下完成对该功能的测试后,右键单击 Cube 对象,然后选择“删除”将其从场景中删除。








