Sistemas de coordenadas do Azure Kinect DK
Neste artigo, descrevemos as convenções usadas para sistemas de coordenadas 2D e 3D. Há sistemas de coordenadas separados associados ao dispositivo de cada sensor e às funções de calibração permitidas para transformar pontos entre eles. As funções de transformação transformam imagens inteiras entre sistemas de coordenadas.
Sistemas de coordenadas 2D
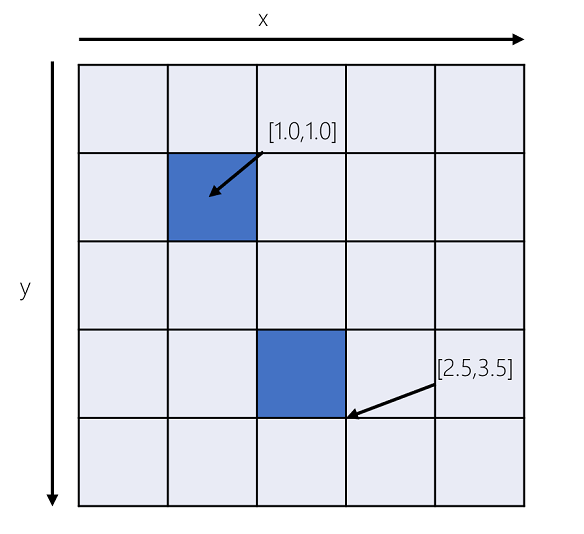
As câmeras de profundidade e cor são associadas a um sistema de coordenadas 2D independente. Uma coordenada [x, y] é representada em unidades de pixels, em que x varia de 0 até largura-1 e y varia de 0 até altura-1. A largura e a altura dependem do modo escolhido no qual as câmeras de profundidade e cor são operadas. A coordenada de pixel [0,0] corresponde ao pixel superior esquerdo da imagem. As coordenadas de pixel podem ser fracionárias representando coordenadas de subpixel.
O sistema de coordenadas 2D é centralizado em 0, ou seja, a coordenada de subpixel [0.0, 0.0] representa o centro e [0.5,0.5] o canto inferior direito do pixel, conforme mostrado abaixo.
Sistemas de coordenadas 3D
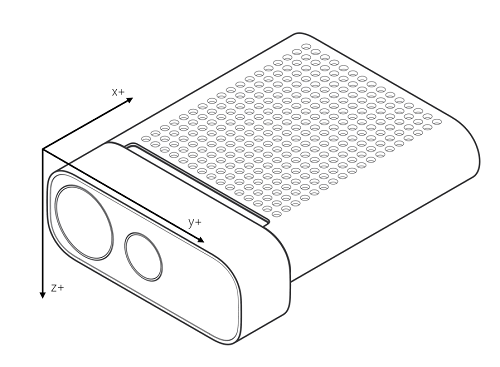
Cada câmera, o acelerômetro e o giroscópio estão associados a um sistema independente de espaço de coordenadas 3D.
Os pontos nos sistemas de coordenadas 3D são representados como métrica [X,Y,Z] – coordenar tercetos com unidades em milímetros.
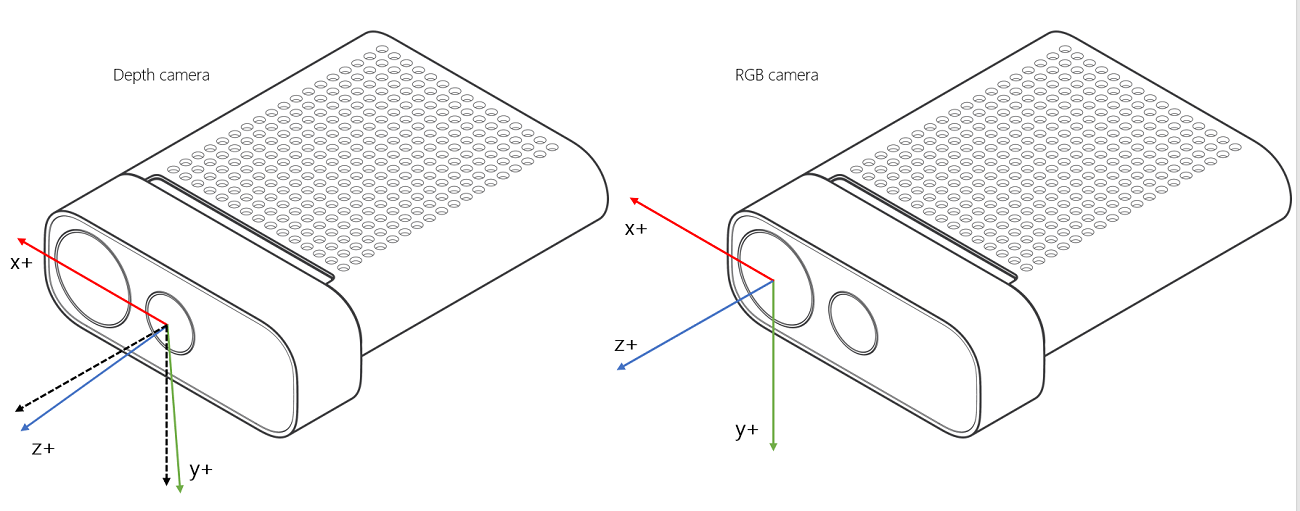
Câmera de profundidade e cor
A origem [0,0,0] está localizada no ponto focal da câmera. O sistema de coordenadas é orientado de modo que os pontos positivos do eixo X sejam corretos, os pontos positivos do eixo Y e os pontos positivos do eixo Z sejam encaminhados.
A câmera de profundidade está inclinada seis graus para baixo da câmera colorida, conforme mostrado abaixo.
Há dois iluminadores usados pela câmera de profundidade. O iluminador usado em modos de NFOV (campo de exibição estreito) é alinhado à capa da câmera de profundidade, portanto, o iluminador não está inclinado. O iluminador usado em modos de WFOV (campo de exibição amplo) é inclinado 1,3 grau para baixo em relação à câmera de profundidade.
Giroscópio e acelerômetro
A origem do giroscópio [0,0,0] é idêntica à origem da câmera de profundidade. A origem do acelerômetro coincide com o local físico dele. Os sistemas de coordenadas acelerômetro e giroscópio são destros. O eixo X positivo do sistema de coordenadas aponta para trás, o eixo Y positivo aponta para a esquerda e o eixo Z positivo aponta para baixo, conforme mostrado abaixo.