Systemy współrzędnych zestawu Azure Kinect DK
W tym artykule opisano konwencje używane w systemach współrzędnych 2D i 3D. Istnieją oddzielne układy współrzędnych skojarzone z urządzeniem każdego czujnika, a funkcje kalibracji mogą przekształcać punkty między nimi. Funkcje przekształcania przekształcają całe obrazy między systemami współrzędnych.
Układy współrzędnych 2D
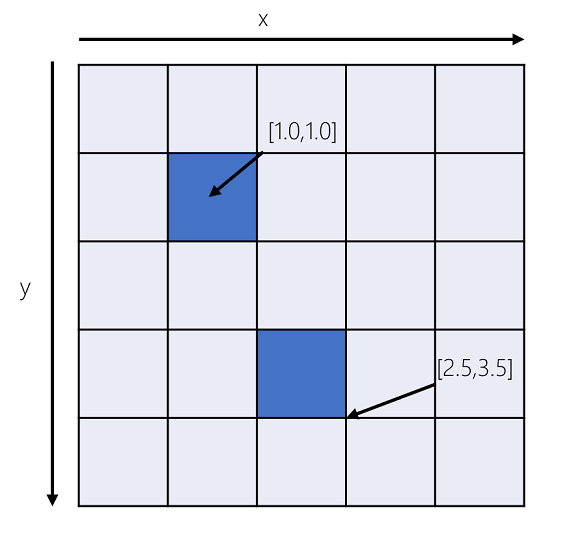
Zarówno kamery głębokości, jak i kolorów są skojarzone z niezależnym układem współrzędnych 2D. Współrzędna [x,y] jest reprezentowana w jednostkach pikseli, w których x waha się od 0 do szerokości 1 i y z zakresu od 0 do wysokości 1. Szerokość i wysokość zależą od wybranego trybu, w którym działają kamery głębokości i kolorów. Współrzędna [0,0] pikseli odpowiada lewemu górnemu pikselowi obrazu. Współrzędne pikseli mogą być ułamkowe reprezentujące współrzędne subpixel.
Układ współrzędnych 2D jest wyśrodkowany 0, czyli współrzędna [0.0, 0.0] subpixel reprezentuje środek i [0.5,0.5] prawy dolny róg piksela, jak pokazano poniżej.
Układy współrzędnych 3D
Każda kamera, akcelerometr i żyroskop, są skojarzone z niezależnym układem przestrzeni współrzędnych 3D.
Punkty w układach współrzędnych 3D są reprezentowane jako metryka [X,Y,Z] współrzędnych trójkropków z jednostkami w milimetrach.
Kamera głębi i koloru
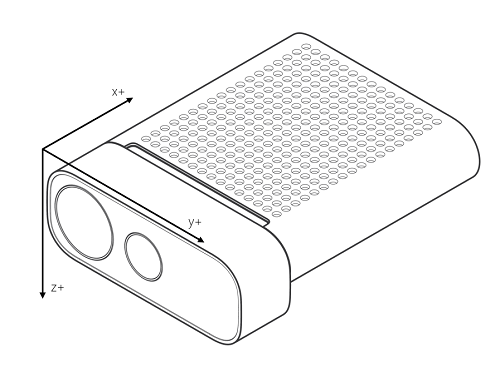
Źródło [0,0,0] znajduje się w centralnym punkcie kamery. Układ współrzędnych jest zorientowany tak, aby dodatnie punkty osi X w prawo, dodatnie punkty osi Y w dół i dodatnie punkty osi Z do przodu.
Kamera głębi jest przechylona 6 stopni w dół kamery kolorów, jak pokazano poniżej.
Istnieją dwa reflektory używane przez kamerę głębinową. Reflektor używany w trybach wąskiego pola widoku (NFOV) jest wyrównany do obudowy kamery głębokości, więc oświetlenie nie jest przechylone. Oświetlenie używane w trybach szerokiego pola widzenia (WFOV) jest przechylone dodatkowe 1,3 stopni w dół w stosunku do kamery głębokości.

Gyroscope i akcelerometr
Początek [0,0,0] żyroskopu jest identyczny z pochodzeniem kamery głębokości. Początek akcelerometru pokrywa się z jego lokalizacją fizyczną. Zarówno akcelerometr, jak i układ współrzędnych żyroskopu są praworęczne. Dodatnie punkty osi X układu współrzędnych do tyłu, dodatnie punkty osi Y w lewo i dodatnie punkty osi Z w dół, jak pokazano poniżej.