Plaatsing van camera voor ruimtelijke analyse
Belangrijk
Op 30 maart 2025 wordt Azure AI Vision Spatial Analysis buiten gebruik gesteld. Stap over naar Azure AI Video Indexer of een andere opensource-oplossing vóór de opgegeven datum. We raden u aan om sneller over te stappen om de rijkere voordelen van Azure AI Video Indexer te verkrijgen. Naast de vertrouwde functies die u gebruikt, kunt u hier een snelle vergelijking maken tussen Ruimtelijke analyse van Azure AI Vision en Azure AI Video Indexer.
| Functie | Ruimtelijke analyse van Azure AI Vision | Azure AI Video Indexer |
|---|---|---|
| Edge-ondersteuning | Ja | Ja |
| Objectdetectie | Alleen detectie van personen en voertuigen | Detecteert meer dan 1000 objecten |
| Audio/spraakverwerking | Niet ondersteund | Ondersteund (inclusief spraaktranscriptie, vertaling en samenvatting) Ondersteund >(inclusief spraaktranscriptie en sentimentanalyse) |
| Gebeurtenisdetectie en -tracering | Ondersteund (tracering van personen en voertuigen, gebeurtenisdetectie) | Wordt nog niet ondersteund in Edge. Wordt gedeeltelijk ondersteund in de cloud. |
| Ondersteuning voor Azure Arc | Niet ondersteund | Systeemeigen ondersteuning |
| Focusgebied | Visuele analyse met gespecialiseerde tracering | Uitgebreide analyse van zowel audio- als visuele inhoud |
Vanaf nu tot en met 30 maart 2025 kunt u Azure AI Vision Spatial Analysis blijven gebruiken of vóór de opgegeven datum overstappen op Azure AI Video Indexer . Na 30 maart 2025 wordt de container ruimtelijke analyse niet meer ondersteund en wordt de verwerking van nieuwe streams gestopt.
Dit artikel bevat aanbevelingen voor cameraplaatsing voor scenario's met ruimtelijke analyse (openbare preview). Het bevat algemene richtlijnen en specifieke aanbevelingen voor hoogte, hoek en camera-naar-brandpuntafstand voor alle meegeleverde bewerkingen.
Notitie
Deze handleiding is ontworpen voor de As M3045-V-camera. Deze camera heeft een resolutie van 1920x1080, een horizontaal beeldveld van 106 graden, een verticaal beeldveld van 59 graden en een vaste brandpuntlengte van 2,8 mm. De onderstaande principes zijn van toepassing op alle camera's, maar specifieke richtlijnen rond camerahoogte en camera-naar-brandpuntafstand moeten worden aangepast voor gebruik met andere camera's.
Algemene richtlijnen
Houd rekening met de volgende algemene richtlijnen bij het plaatsen van camera's voor ruimtelijke analyse:
- Verlichtingshoogte" Plaats camera's onder verlichtingsarmaturen, zodat de camera's niet worden geblokkeerd.
- Obstakels: Om het blokkeren van cameraweergaven te voorkomen, moet u rekening houden met obstakels zoals polen, bewegwijzering, rekken, muren en bestaande LP-camera's.
- Omgevingsachterlichting: Buitenverlichting is van invloed op de beeldkwaliteit van de camera. Om ernstige achtergrondverlichting te voorkomen, vermijdt u het omsturen van camera's bij externe ramen en glazen deuren.
- Lokale privacyregels en -voorschriften: Lokale voorschriften kunnen beperken welke camera's kunnen vastleggen. Zorg ervoor dat u de lokale regels en voorschriften begrijpt voordat u camera's plaatst.
- Bouwstructuur: HVAC, sprinklers en bestaande bedrading kunnen de harde montage van camera's beperken.
- Kabelbeheer: zorg ervoor dat u een ethernetkabel van geplande camerakoppelingslocaties kunt routeren naar de PoE-switch (Power Over Internet).
Hoogte, brandpuntafstand en hoek
U moet rekening houden met drie dingen bij het bepalen hoe u een camera installeert voor ruimtelijke analyse:
- Camerahoogte
- Afstand van camera-naar-brandpunt
- De hoek van de camera ten opzichte van het vloervlak
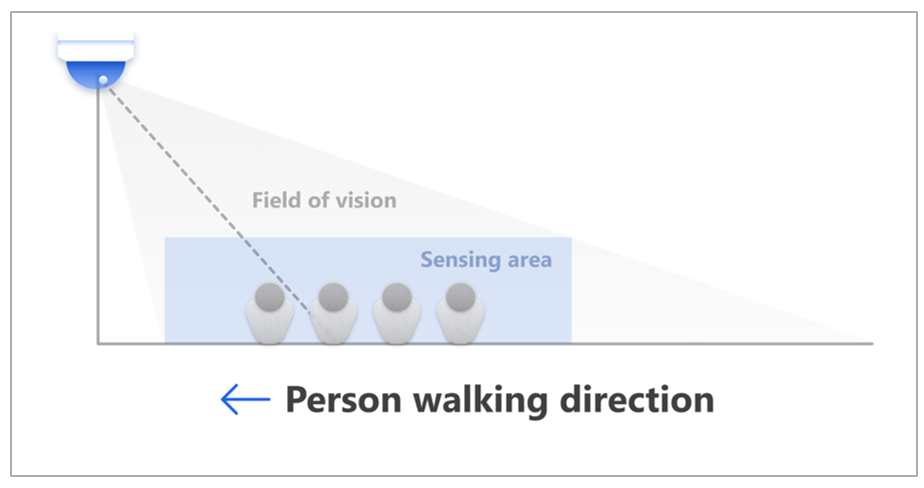
Het is ook belangrijk om te weten welke richting de meeste mensen lopen (persoon lopend) in relatie tot het cameraveld van de weergave, indien mogelijk. Deze richting is belangrijk voor systeemprestaties.
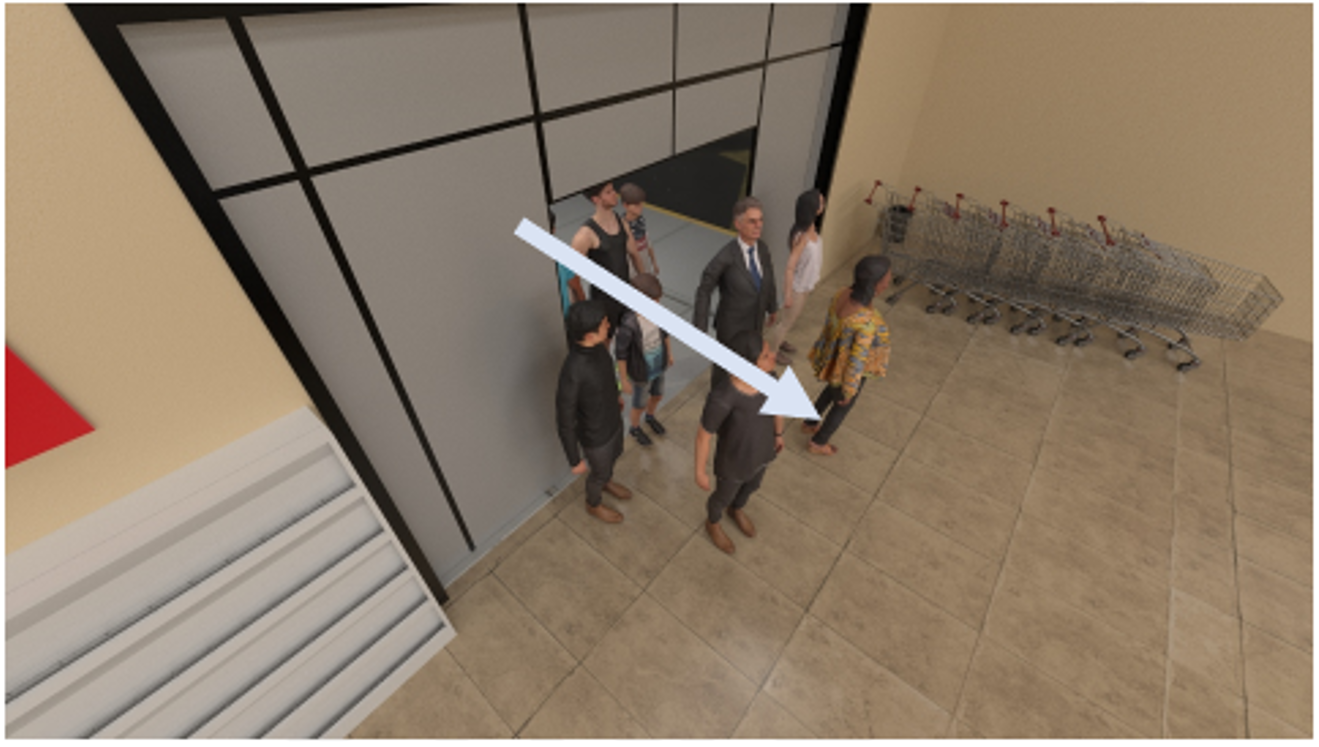
In de volgende afbeelding ziet u de hoogteweergave voor personen die lopen.
Camerahoogte
Over het algemeen moeten camera's op 12-14 meter van de grond worden gemonteerd. Voor gezichtsmaskerdetectie raden we aan camera's te monteren op 8-12 meter van de grond. Houd bij het plannen van de camera-montage in dit bereik rekening met obstakels (bijvoorbeeld: rekken, hanglampen, hangende borden en beeldschermen) die van invloed kunnen zijn op de cameraweergave en pas de hoogte zo nodig aan.
Afstand van camera-naar-brandpunt
Camera-naar-brandpuntafstand is de lineaire afstand van het brandpunt (of het midden van de cameraafbeelding) tot de camera die op de grond wordt gemeten.

Deze afstand wordt gemeten op het vloervlak.
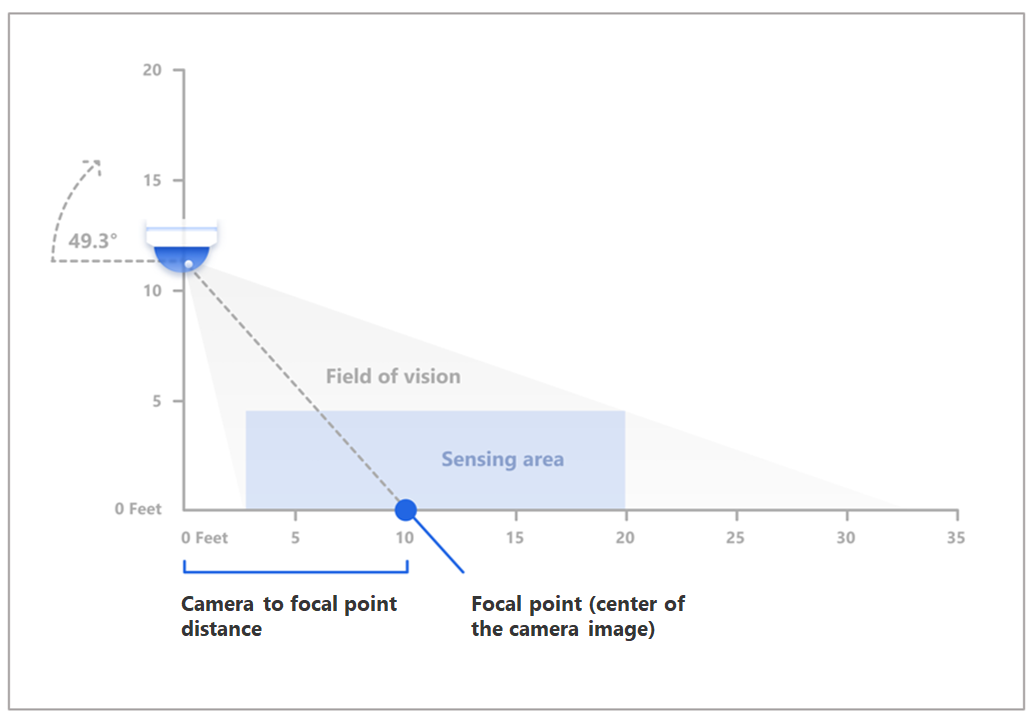
Van bovenaf ziet het er als volgt uit:
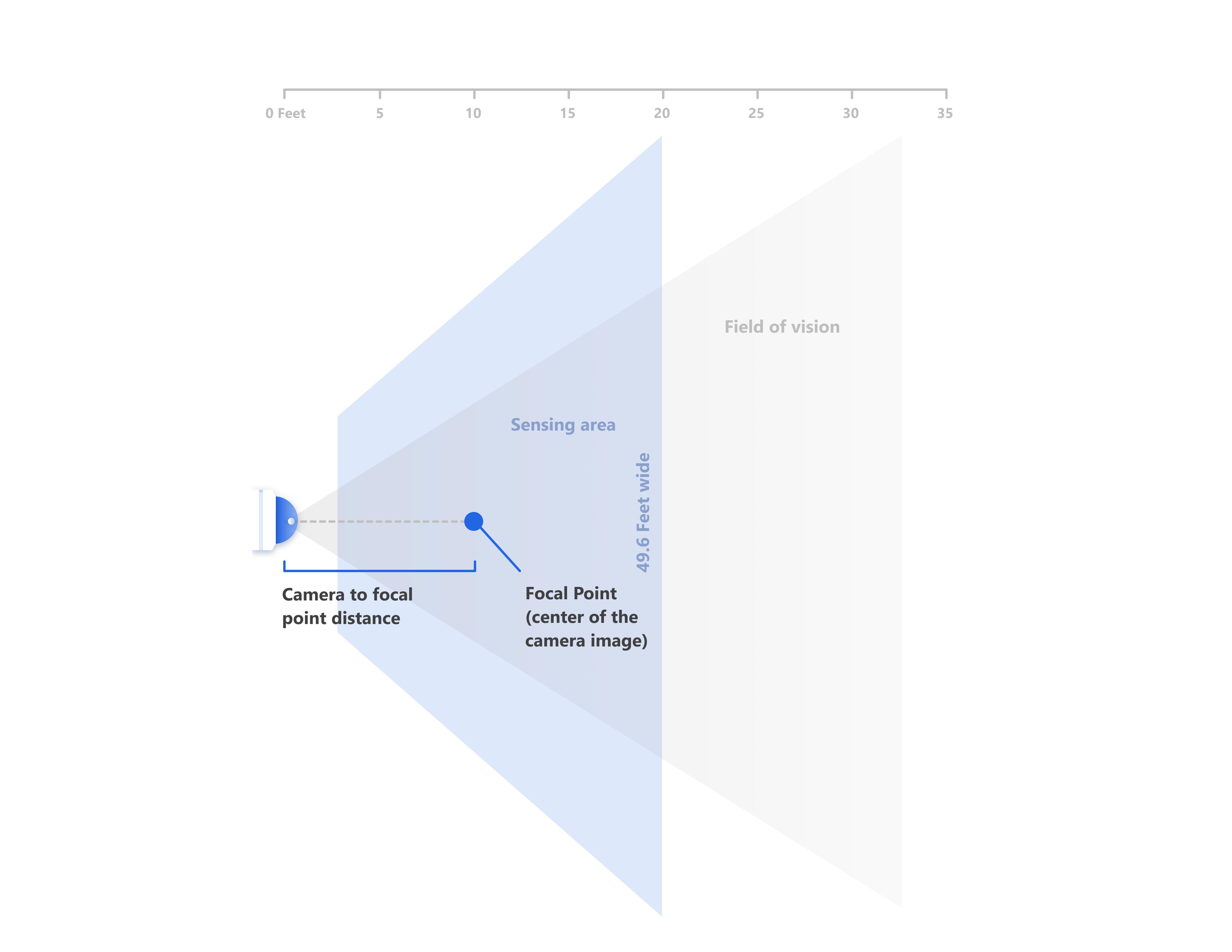
Gebruik de onderstaande tabel om de afstand van de camera van het brandpunt te bepalen op basis van specifieke montagehoogten. Deze afstanden zijn voor optimale plaatsing. De tabel bevat richtlijnen onder de aanbeveling 12'-14, omdat sommige plafonds de hoogte kunnen beperken. Voor gezichtsmaskerdetectie is aanbevolen camera-naar-brandpuntafstand (min/max) 4'-10' voor camerahoogte tussen 8' en 12'.
| Camerahoogte | Afstand van camera-naar-brandpunt (min/max) |
|---|---|
| 8' | 4.6'-8' |
| 10' | 5.8'-10' |
| 12' | 7'-12' |
| 14' | 8'-14' |
| 16' | 9.2'-16' |
| 20' | 11.5'-20' |
In de volgende afbeelding worden cameraweergaven gesimuleerd van de dichtstbijzijnde en dichtstbijzijnde camera-naar-brandpuntafstand.
| Dichtstbijzijnd | Verste |
|---|---|

|

|
Camerahoek montagebereiken
In deze sectie worden acceptabele camerahoek-montagebereiken beschreven. Deze montagebereiken tonen het acceptabele bereik voor optimale plaatsing.
Lijnconfiguratie
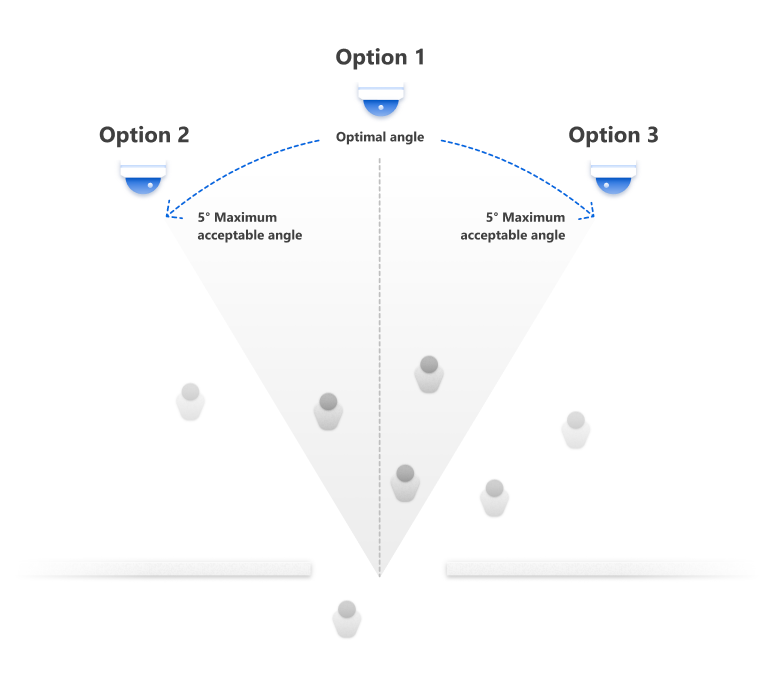
Voor de bewerking cognitiveservices.vision.spatialanalysis-personcrossingline is +/-5° de optimale camera-montagehoek om de nauwkeurigheid te maximaliseren.
Voor gezichtsmaskerdetectie is +/-30 graden de optimale camera-montagehoek voor camerahoogte tussen 8' en 12'.
In de volgende afbeelding worden cameraweergaven gesimuleerd met behulp van de meest linkse (-) en meest rechtse (+) montagehoekaanbevelingen voor het gebruik van cognitiveservices.vision.spatialanalysis-personcrossingline om ingangen in een deur te tellen.
| Meest linkse weergave | Meest rechtse weergave |
|---|---|

|

|
In de volgende afbeelding ziet u de plaatsing en montagehoeken van een vogelvlucht.
Zoneconfiguratie
We raden u aan camera's op 10 meter of meer boven de grond te plaatsen om te garanderen dat het overdekte gebied groot genoeg is.
Wanneer de zone zich naast een obstakel bevindt, zoals een wand of plank, monteren camera's op de opgegeven afstand van het doel binnen het acceptabele hoekbereik van 120 graden, zoals wordt weergegeven in de volgende afbeelding.
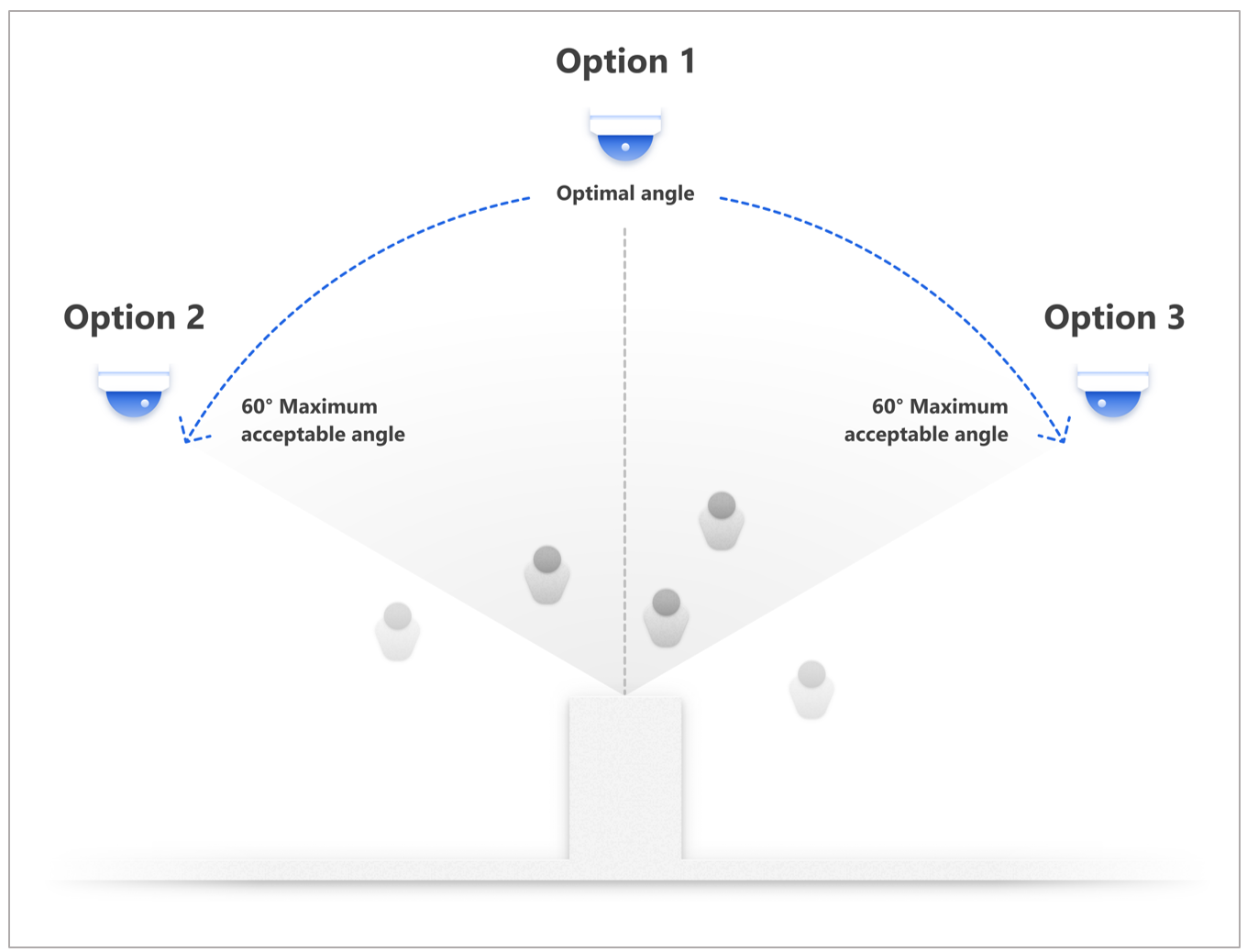
De volgende afbeelding biedt simulaties voor de linker- en rechtercameraweergaven van een gebied naast een plank.
| Linkerweergave | Rechterweergave |
|---|---|

|

|
Wachtrijen
De cognitiveservices.vision.spatialanalysis-personcount, cognitiveservices.vision.spatialanalysis-persondistance en cognitiveservices.vision.spatialanalysis-personcrossingpolygon vaardigheden kunnen worden gebruikt om wachtrijen te bewaken. Voor een optimale kwaliteit van wachtrijgegevens hebben intrekbare riembarrières de voorkeur om de occlusie van de mensen in de wachtrij te minimaliseren en ervoor te zorgen dat de locatie van de wachtrijen in de loop van de tijd consistent is.
Dit type barrière heeft de voorkeur boven ondoorzichtige barrières voor wachtrijvorming om de nauwkeurigheid van de inzichten van het systeem te maximaliseren.
Er zijn twee soorten wachtrijen: lineair en zig-zag.
In de volgende afbeelding ziet u aanbevelingen voor lineaire wachtrijen:
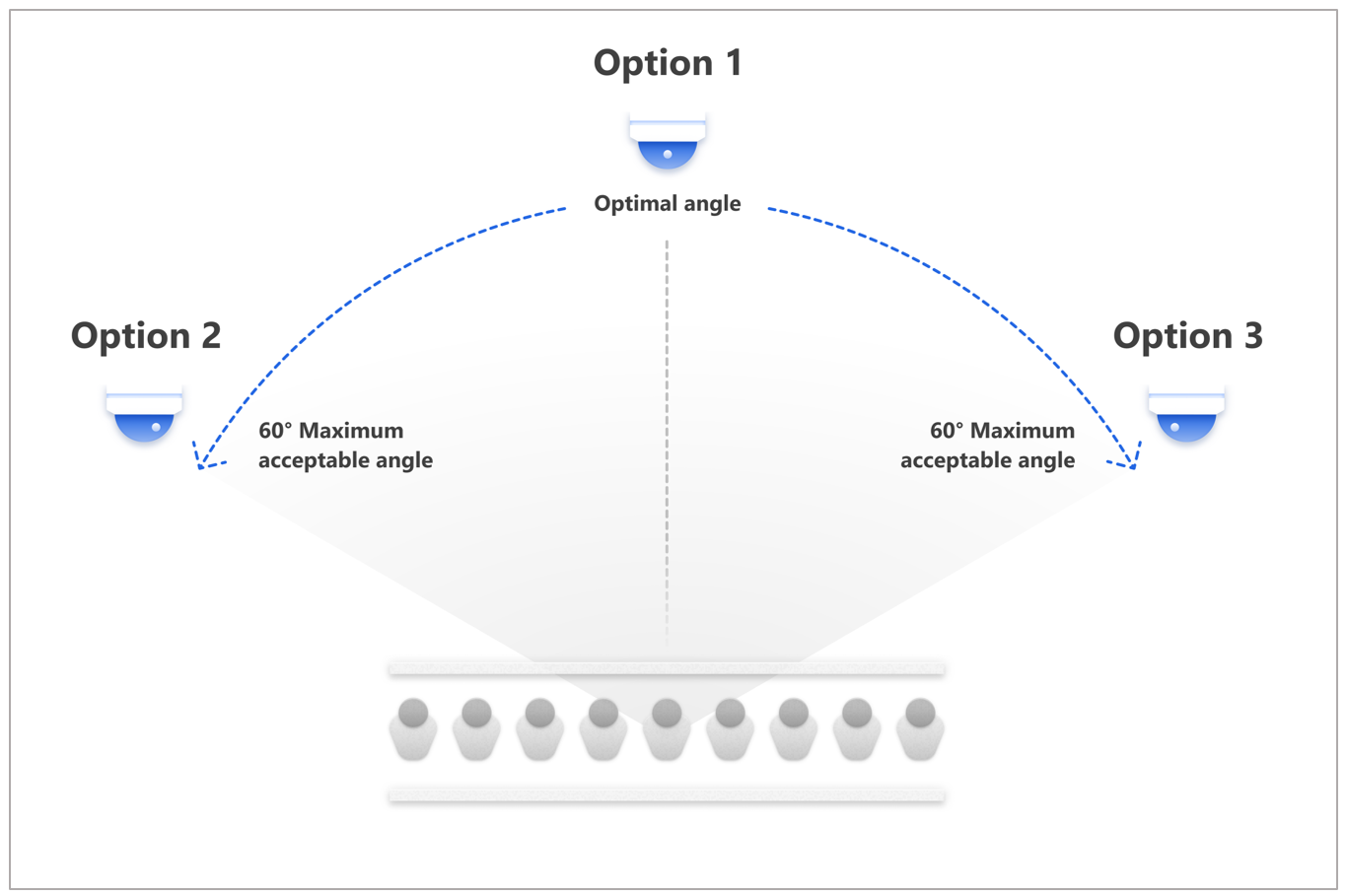
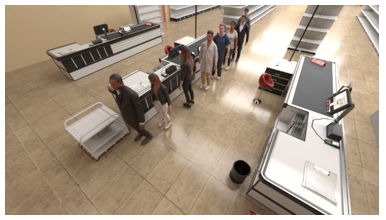
In de volgende afbeelding ziet u simulaties voor de linker- en rechtercameraweergaven van lineaire wachtrijen. U kunt de camera aan de andere kant van de wachtrij koppelen.
| Linkerweergave | Rechterweergave |
|---|---|

|
|
Voor zig-zag-wachtrijen kunt u het beste voorkomen dat de camera rechtstreeks naar de richting van de wachtrijlijn wordt geplaatst, zoals wordt weergegeven in de volgende afbeelding. Elk van de vier voorbeeldcameraposities in de afbeelding biedt de ideale weergave met een acceptabele afwijking van +/- 15 graden in elke richting.
In de volgende illustraties wordt de weergave van een camera gesimuleerd op de ideale locaties voor een zigzag-wachtrij.
| Weergave 1 | Weergave 2 |
|---|---|

|

|
| Weergave 3 | Weergave 4 |
|---|---|

|

|
Organische wachtrijen
Organische wachtrijen zijn lijnen die organisch vormen. Deze stijl van de wachtrij is acceptabel als wachtrijen niet meer dan 2-3 personen en de lijnformulieren binnen de zonedefinitie vormen. Als de lengte van de wachtrij doorgaans meer dan 2-3 personen is, raden we u aan een intrekbare riembarrière te gebruiken om de wachtrijrichting te begeleiden en ervoor te zorgen dat de lijnvormen binnen de zonedefinitie worden bepaald.