join_view クラス (C++ 標準ライブラリ)
範囲の要素を 1 つのビューに結合します。
構文
template<input_range R> requires view<R> && input_range<range_reference_t<R>> &&
(is_reference_v<range_reference_t<R>> || view<range_value_t<R>>)
class join_view : public view_interface<join_view<R>>;
テンプレート パラメーター
R
基になる範囲の型。 input_range以上を満たす必要があります。
特性の表示
以下の項目の説明については、 View クラスの特性を参照してください。
| 特徴 | 説明 |
|---|---|
| 範囲アダプター | views::join |
| 基になる範囲 | input_range以上を満たす必要があります |
| 要素の種類 | 基になる範囲と同じ |
| 反復子カテゴリの表示 | input_range反復処理される基になる範囲に応じて最大bidirectional_range |
| サイズ | いいえ |
const対応 |
基になる範囲が const 可能な場合のみ |
| 共通範囲 | 基になる範囲が満たされる場合のみ common_range |
| 借用範囲 | いいえ |
メンバー
| メンバー関数 | 説明 |
|---|---|
| コンストラクターC++20 | join_view を構築します。 |
baseC++20 |
基になる範囲への参照を取得します。 |
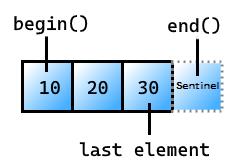
beginC++20 |
最初の要素を指す反復子を取得します。 |
endC++20 |
ビューの最後にあるセンチネルを取得します。 |
継承の対象 view_interface |
説明 |
backC++20 |
最後の要素を取得します。 |
emptyC++20 |
ビューが空かどうかをテストします。 |
frontC++20 |
最初の要素を取得します。 |
operator boolC++20 |
ビューが空でないかどうかをテストします。 |
解説
join_viewを作成する最善の方法は、views::join範囲アダプターを使用することです。 範囲アダプターは、ビュー クラスにアクセスするための目的の方法です。 独自のカスタム ビューの種類を作成する場合は、ビューの種類が公開されます。
このビューは、複数の範囲を 1 つのビューに結合する場合に便利です。
要件
Header: <ranges> (C++20 以降)
名前空間: std::ranges
コンパイラ オプション: /std:c++20 以降が必要です。
コンストラクター
join_view のインスタンスを作成します。
1) join_view() = default;
2) constexpr explicit join_view(R base)
パラメーター
base
基になる範囲。
テンプレート パラメーターの型の詳細については、「 Template パラメーターを参照してください。
解説
1) join_viewを既定で構築します。
2) baseからjoin_viewを構築します。
例: join_view
// requires /std:c++20, or later
#include <iostream>
#include <vector>
#include <ranges>
int main()
{
std::vector<int> rg1{1, 2, 3, 4};
std::vector<int> rg2{5, 6, 7};
std::vector<int> rg3{8, 9, 10, 11, 12, 13};
std::vector<int> rangeOfRanges[] {rg1, rg2, rg3};
auto jv = std::ranges::join_view(rangeOfRanges);
for (auto& e : jv)
{
std::cout << e << " ";
}
}
1 2 3 4 5 6 7 8 9 10 11 12 13
base
基になるビューを取得します。
// Uses a copy constructor to return the underlying view
1) constexpr V base() const& requires std::copy_constructible<V>;
// Uses a move constructor to return the underlying view
2) constexpr V base() &&;
パラメーター
ありません。
戻り値
- 返されたビューはコピーが作成されます。
- 返されたビューは移動が構築されます。
begin
ビューの最初の要素を指す反復子を取得します。
constexpr auto begin();
constexpr auto begin() const
requires ranges::input_range<const V> && std::is_reference_v<ranges::range_reference_t<const V>>;
パラメーター
ありません。
戻り値
ビューの最初の要素を指す反復子:
end
ビューの最後にあるセンチネルを取得します。
constexpr sentinel_t<R> end();
constexpr auto end() const requires range<const R>
パラメーター
ありません。
戻り値
ビューの最後の要素に続く Sentinel: