Esercizio - Posizionare gli oggetti del gioco e impostare la visibilità
Si apprenderà ora come creare oggetti padre, aggiungere prefab alla scena e usare il componente Transform per inserirli in posizioni specifiche.
Importare gli asset dell'esercitazione
Per iniziare, scaricare prima di tutto il pacchetto personalizzato Unity seguente: MRTK. HoloLens2.Unity.Tutorials.Assets.GettingStarted.3.0.0.unitypackage
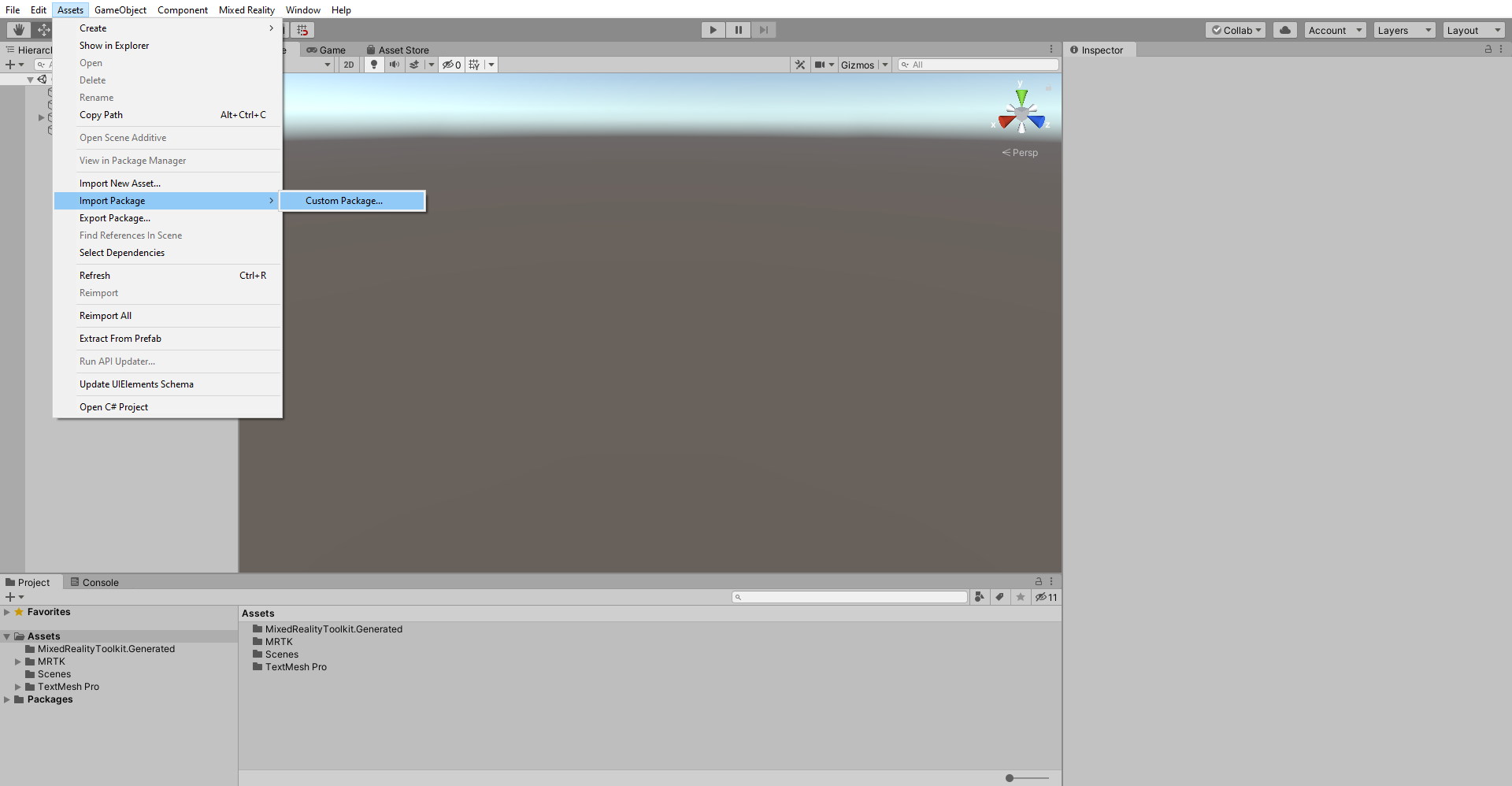
Nel menu di Unity selezionare Asset>Importa pacchetto>Pacchetto personalizzato.
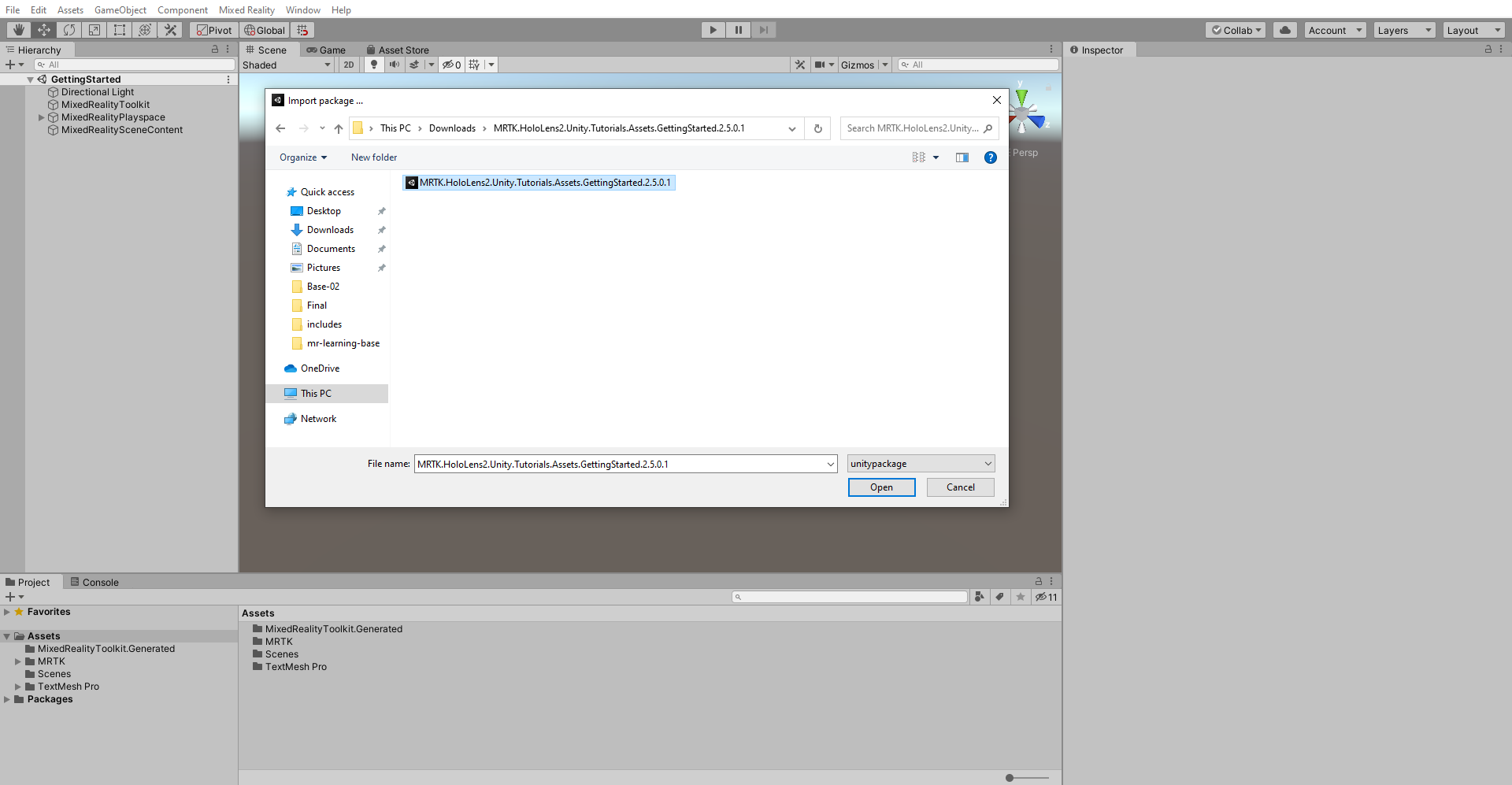
In Importa pacchetto selezionare il pacchetto MRTK.HoloLens2.Unity.Tutorials.Assets.GettingStarted.3.0.0.unity scaricato e quindi selezionare Apri.
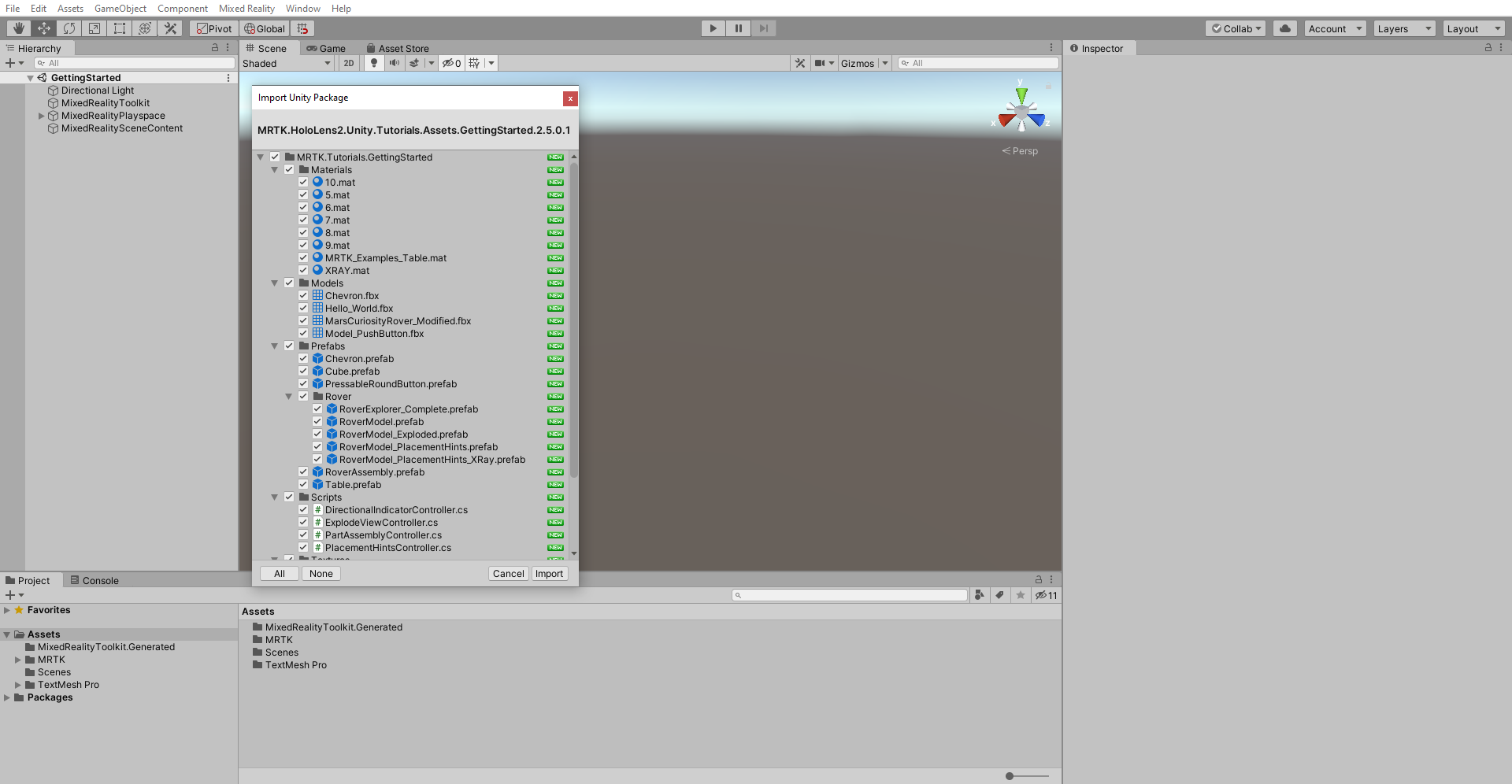
Nella finestra Importa pacchetto Unity selezionare il pulsante Tutti per assicurarsi che tutti gli asset siano selezionati. Quindi, selezionare Import (Importa).



Creare l'oggetto padre
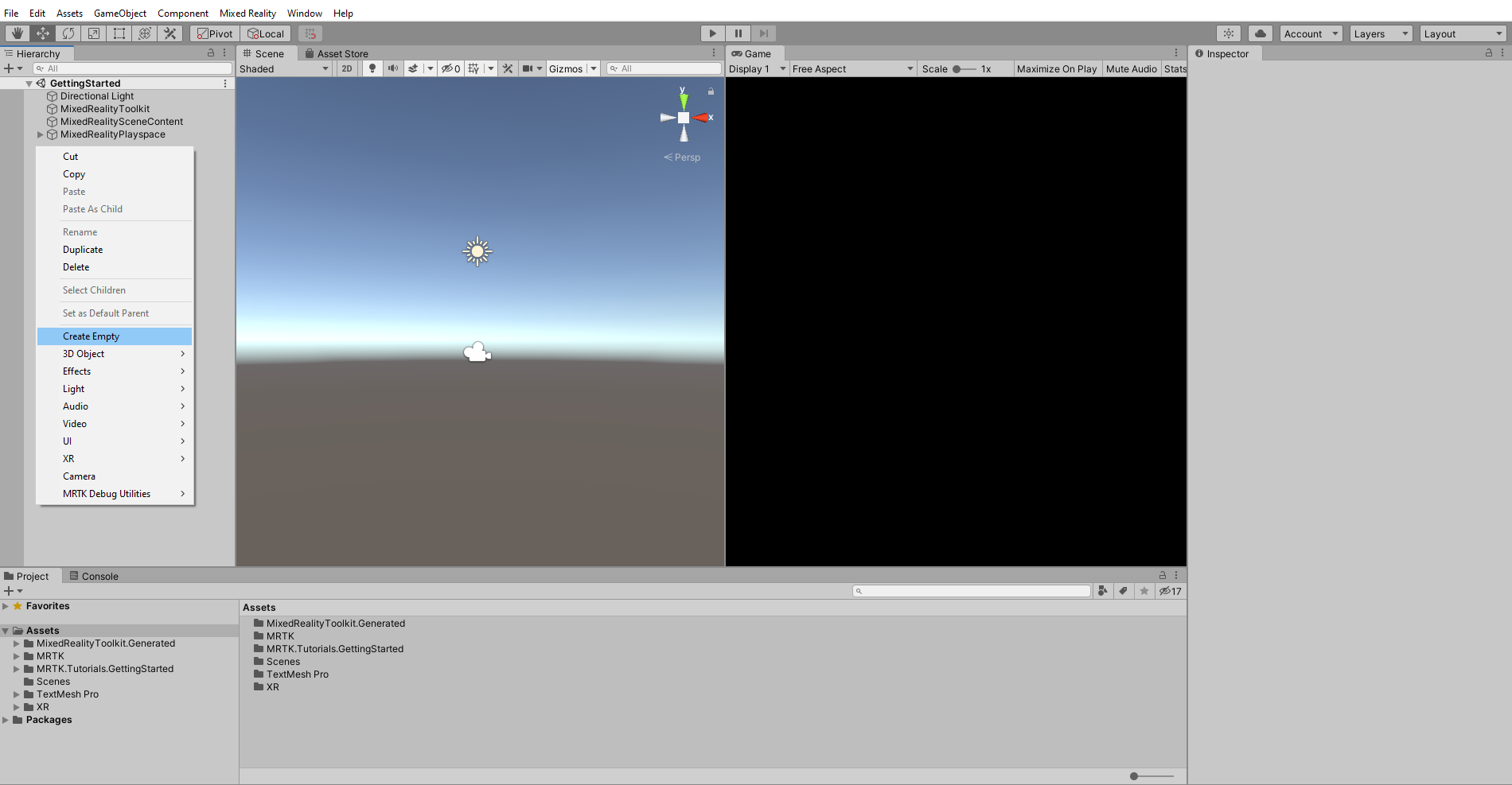
Nella finestra Gerarchia fare clic con il pulsante destro del mouse su un'area vuota e scegliere Crea vuoto per aggiungere un oggetto vuoto alla scena.
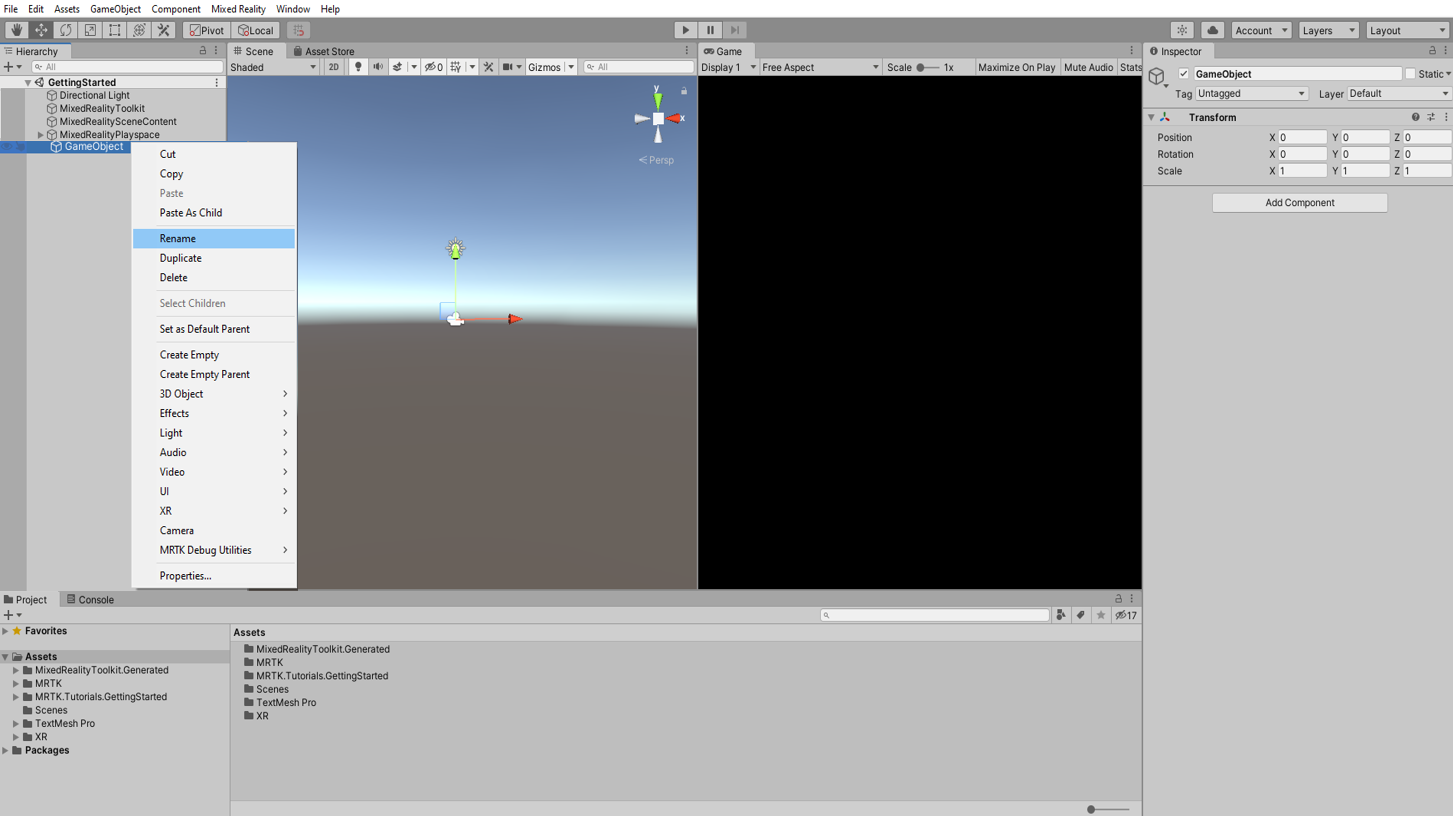
Fare clic con il pulsante destro del mouse sull'oggetto appena creato, scegliere Rinominae modificare il nome in RoverExplorer.
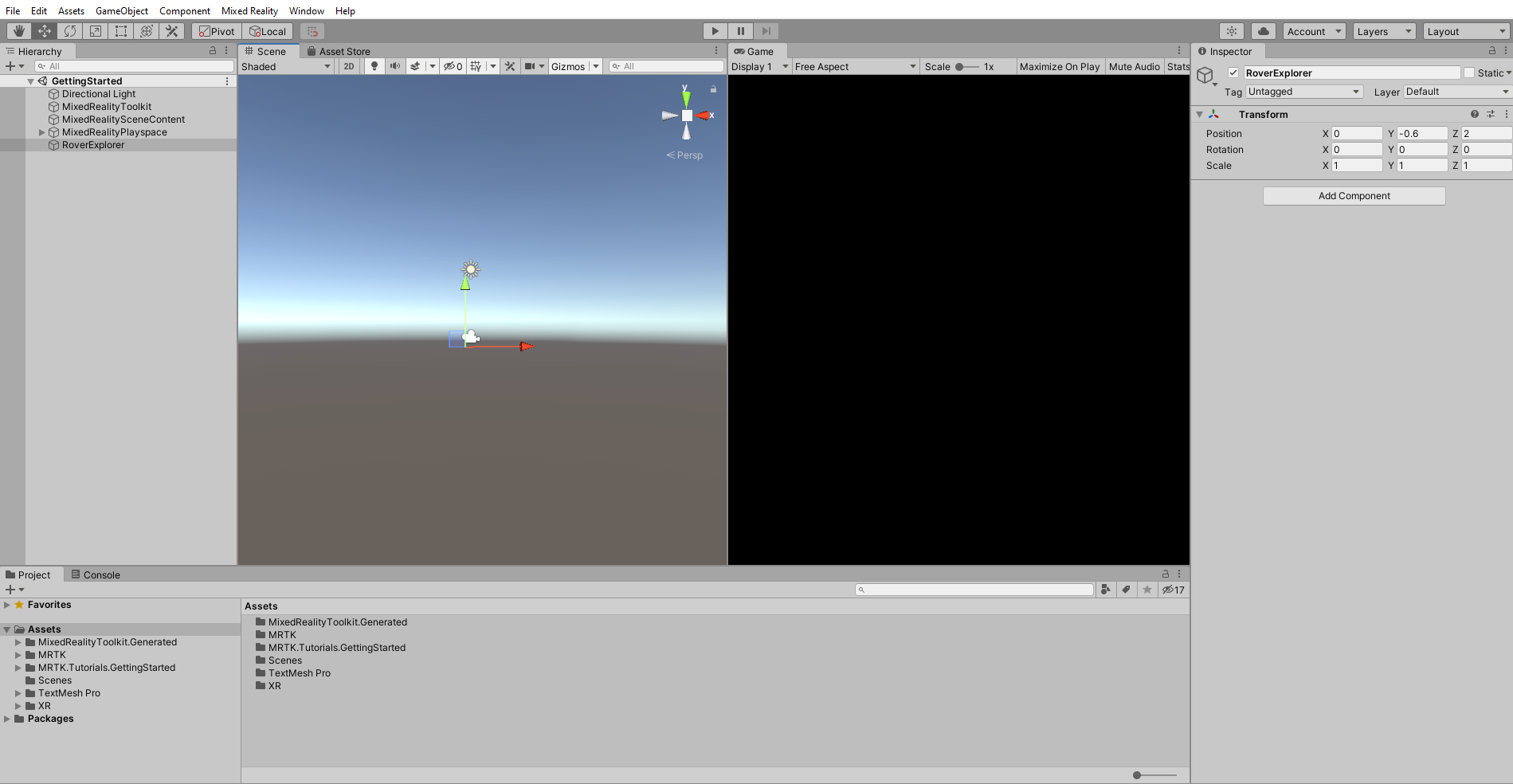
Con l'oggetto RoverExplorer ancora selezionato, nella finestra Controllo configurare il componente Transform come indicato di seguito:
- Posizione: X = 0, Y = 0,9, Z = 2
- Rotazione: X = 0, Y = 0, Z = 0
- Scale (Scala): X = 1, Y = 1, Z = 1



Aggiungere i prefab per l'esercitazione
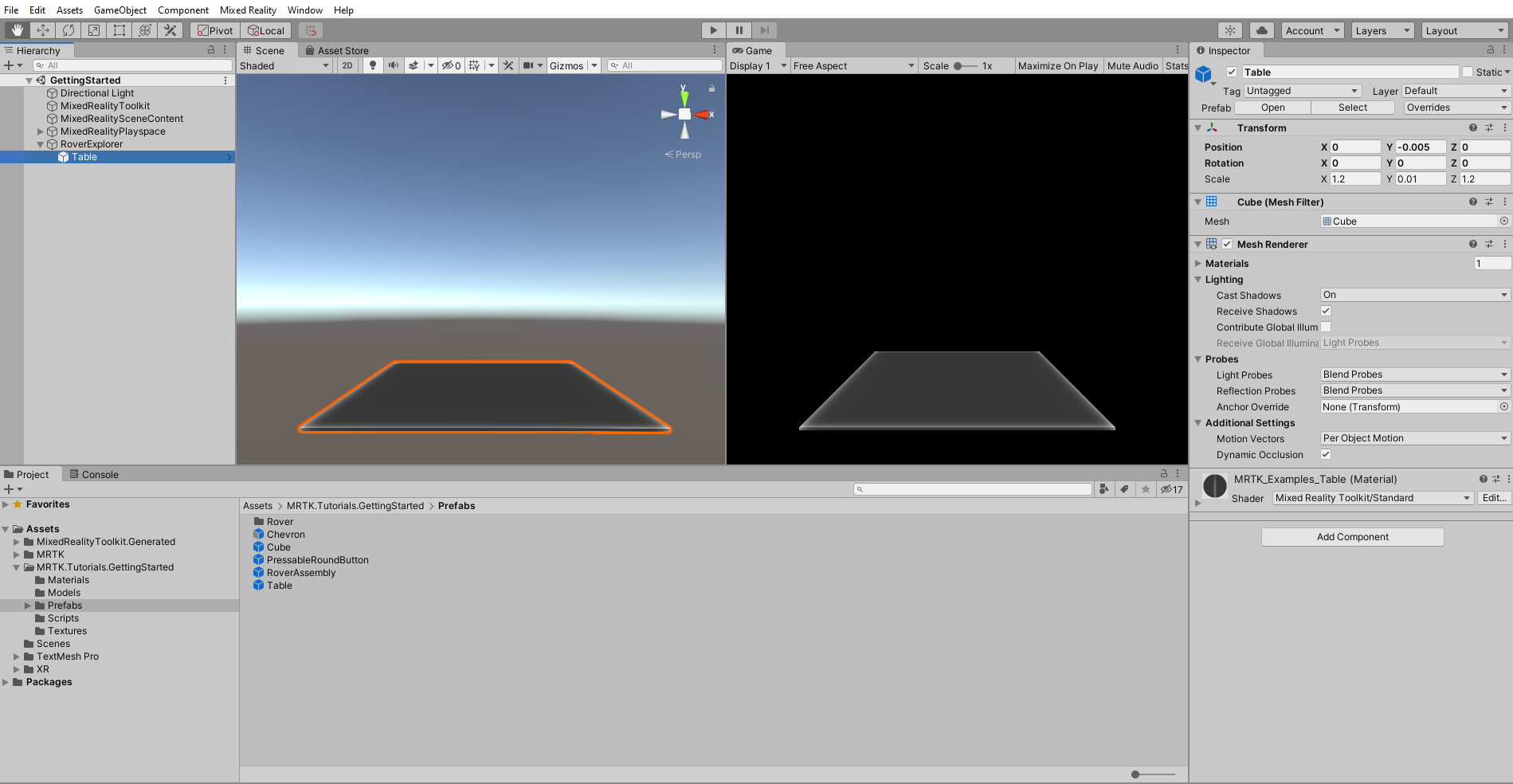
Nella finestra Progetto, aprire la cartella Asset>MRTK.Tutorials.GettingStarted>Prefab.
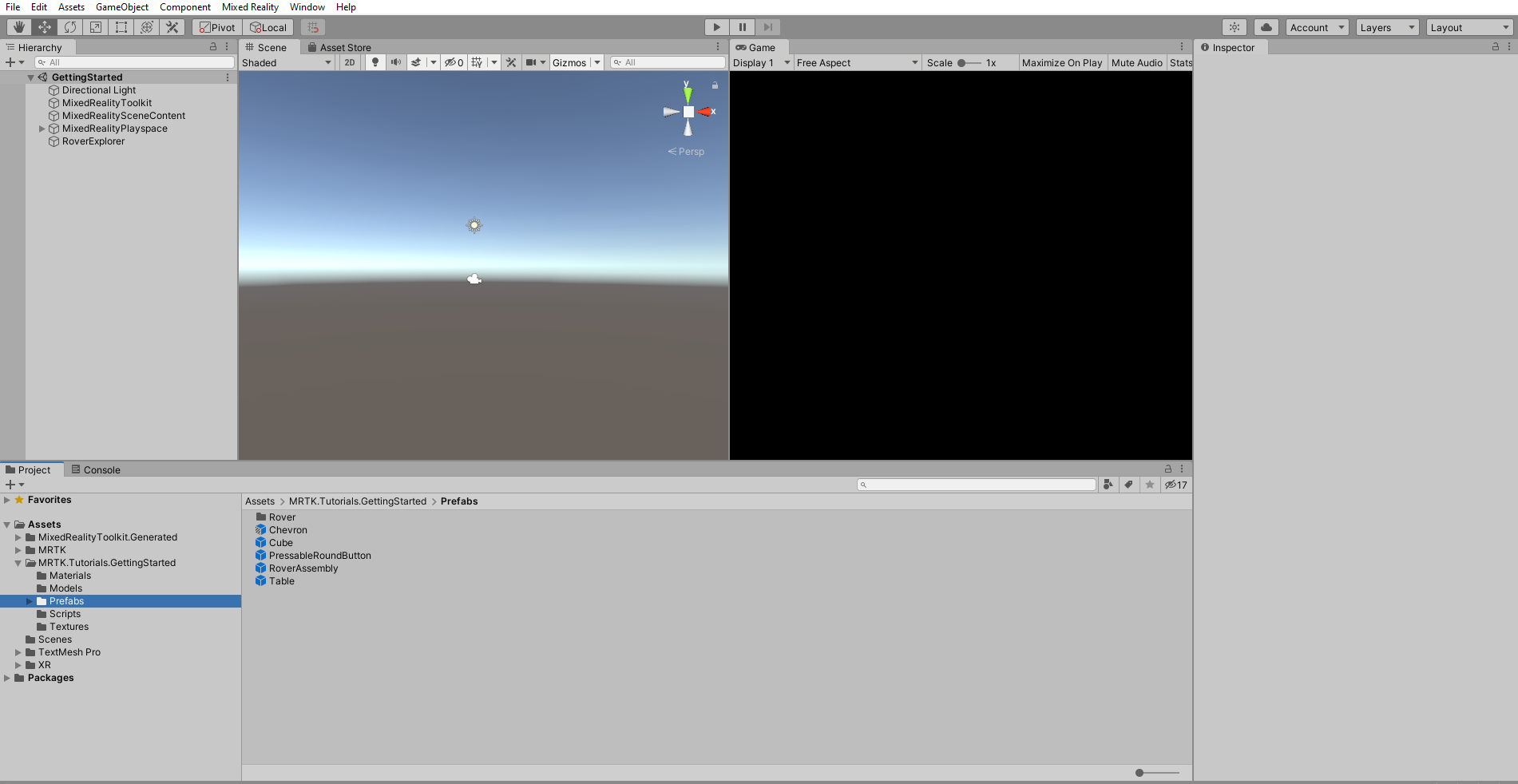
Dalla finestra Progetto trascinare il prefab Tabella verso l'oggetto RoverExplorer per renderlo un elemento figlio di tale oggetto. Nella finestraControllo configurare il componente Trasforma della tabella come indicato di seguito:
- Position (Posizione): X = 0, Y = - 0,005, Z = 0
- Rotazione: X = 0, Y = 0, Z = 0
- Scale (Scala): X = 1,2, Y = 0,01, Z = 1,2
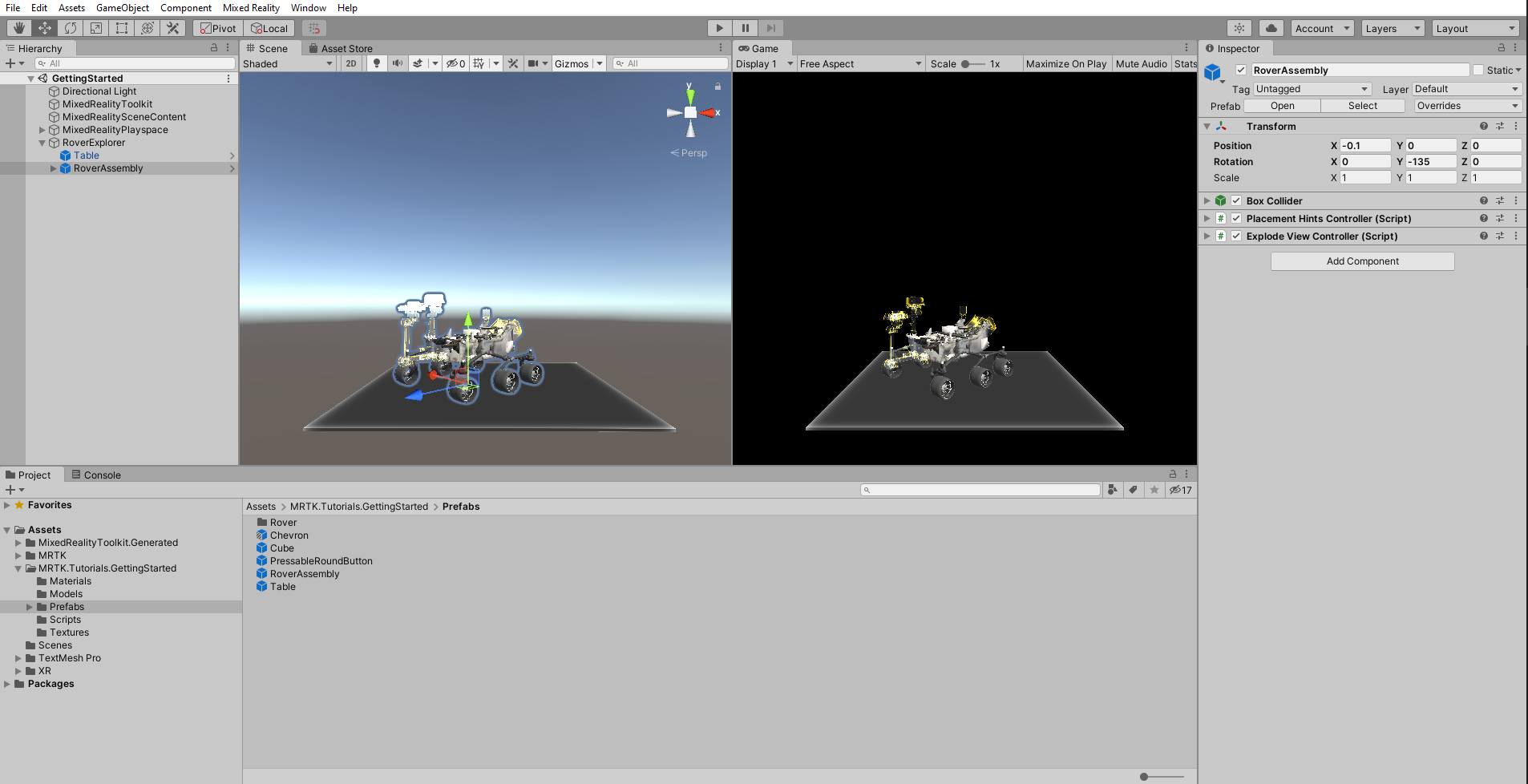
Dal riquadro Progetto trascinare il prefab RoverAssembly nell'oggetto RoverExplorer per renderlo un elemento figlio di tale oggetto. Poi, in Controllo configurare il componente Transform come indicato di seguito:
- Position (Posizione): X = - 0,1, Y = 0, Z = 0
- Rotazione: X = 0, Y = - 135, Z = 0
- Scale (Scala): X = 1, Y = 1, Z = 1