Posizionamento della fotocamera per l'analisi spaziale
Importante
Il 30 marzo 2025, l'analisi spaziale di Visione artificiale di Azure verrà ritirata. Passare ad Azure AI Video Indexer o a un'altra soluzione open source prima della data specificata. È consigliabile passare prima a ottenere i vantaggi più avanzati di Video Indexer per intelligenza artificiale di Azure. Oltre alle funzionalità familiari in uso, di seguito è riportato un rapido confronto tra Analisi spaziale di Visione artificiale di Azure e Video Indexer di Intelligenza artificiale di Azure.
| Funzionalità | Analisi spaziale di Visione di Azure AI | Video Indexer di Azure AI |
|---|---|---|
| Supporto edge | Sì | Sì |
| Rilevamento oggetti | Solo rilevamento persone e veicoli | Rileva più di 1000 oggetti |
| Elaborazione audio/vocale | Non supportato | Supportato (include trascrizione vocale, traduzione e riepilogo) Supportato >(include la trascrizione vocale e l'analisi del sentiment) |
| Rilevamento e rilevamento eventi | Supportato (rilevamento di persone e veicoli, rilevamento eventi) | Non supportato ancora in Edge. È parzialmente supportato nel cloud. |
| Supporto di Azure Arc | Non supportato | Supporto nativo |
| Area di interesse | Analisi visiva con rilevamento specializzato | Analisi completa del contenuto audio e visivo |
Fino al 30 marzo 2025, è possibile continuare a usare Analisi spaziale di Visione artificiale di Azure o passare ad Azure AI Video Indexer prima della data specificata. Dopo il 30 marzo 2025, il contenitore di analisi spaziale non sarà più supportato e interromperà l'elaborazione di nuovi flussi.
Questo articolo fornisce consigli sul posizionamento della fotocamera per gli scenari di analisi spaziale (anteprima pubblica). Include linee guida generali e raccomandazioni specifiche per altezza, angolo e distanza da fotocamera a punto focale per tutte le operazioni incluse.
Nota
Questa guida è stata progettata per la fotocamera Axis M3045-V. Questa fotocamera ha una risoluzione 1920x1080, un campo orizzontale a 106 gradi di visualizzazione, un campo verticale di visualizzazione a 59 gradi e una lunghezza focale fissa di 2,8 mm. I principi seguenti si applicano a tutte le fotocamere, ma le linee guida specifiche per l'altezza della fotocamera e la distanza tra fotocamera e punto focale dovranno essere regolate in base alle fotocamere effettivamente usate.
Linee guida generali
Quando si posizionano fotocamere per l'analisi spaziale, prendere in considerazione le linee guida generali seguenti:
- Altezza illuminazione: posizionare le fotocamere sotto gli strumenti di illuminazione in modo che questi non ostruiscano la visuale delle fotocamere.
- Ostacoli: per evitare di ostruire la visuale della fotocamera, considerare la presenza di eventuali ostacoli, ad esempio pali, cartelloni, scaffalature, pareti e altre fotocamere con sistema LP esistenti.
- Retroilluminazione ambientale: la retroilluminazione esterna influisce sulla qualità dell'immagine della fotocamera. Per evitare condizioni di retroilluminazione impattanti, evitare di direzionare le fotocamere verso finestre e porte a vetri rivolte all'esterno.
- Regole e normative locali sulla privacy: le normative locali possono limitare ciò che le fotocamere possono acquisire. Assicurarsi di conoscere le regole e le normative locali prima di posizionare le fotocamere.
- Creazione della struttura: i sistemi HVAC, i sistemi antincendio e gli impianti elettrici esistenti possono limitare il montaggio fisso delle fotocamere.
- Gestione dei cavi: assicurarsi di portare il cavo Ethernet dalle posizioni di montaggio pianificate delle fotocamere al commutatore Power Over Internet (PoE).
Altezza, distanza e angolazione del punto focale
È necessario considerare tre aspetti quando si decide come installare una fotocamera per l'analisi spaziale:
- Altezza della fotocamera
- Distanza tra fotocamera e punto focale
- Angolazione della fotocamera rispetto al piano del pavimento
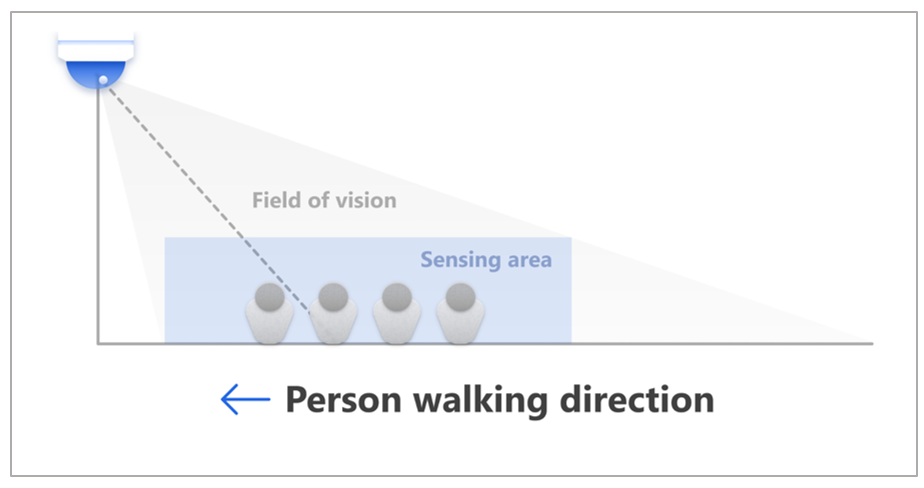
È anche importante conoscere la direzione che la maggior parte delle persone cammina (direzione di marcia della persona) in relazione al campo di visualizzazione della fotocamera, se possibile. Questa direzione è importante per le prestazioni del sistema.
La figura seguente mostra la vista in elevazione per la direzione di marcia delle persone.
Altezza della fotocamera
In genere, le fotocamere devono essere montate a 12-14 piedi da terra. Per il rilevamento delle mascherine, è consigliabile montare le fotocamere a 8-12 piedi da terra. Quando si pianifica il montaggio delle fotocamera in base a questo intervallo di distanze, considerare gli ostacoli (ad esempio scaffalature, luci sospese, segnaletica sospesa e schermi) che potrebbero ostacolare la visuale delle fotocamere e pertanto regolare l'altezza in base alle esigenze specifiche.
Distanza tra fotocamera e punto focale
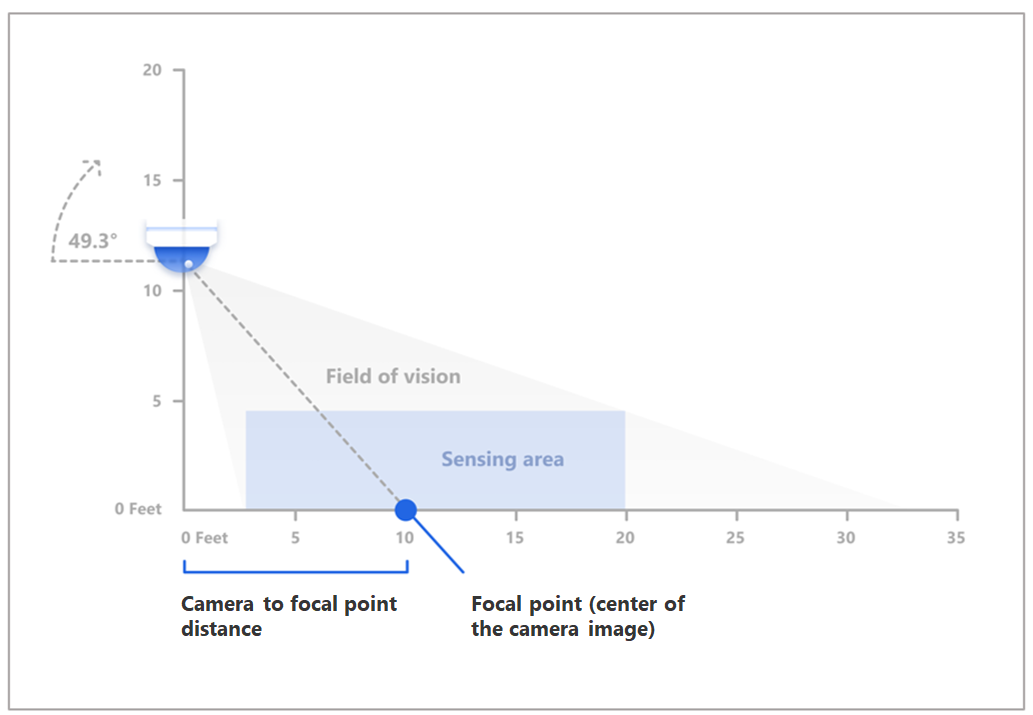
La distanza tra fotocamera a punto focale è la distanza lineare tra il punto focale (o il centro dell'immagine della fotocamera) e la fotocamera rispetto al suolo.

Questa distanza viene misurata rispetto al piano del pavimento.
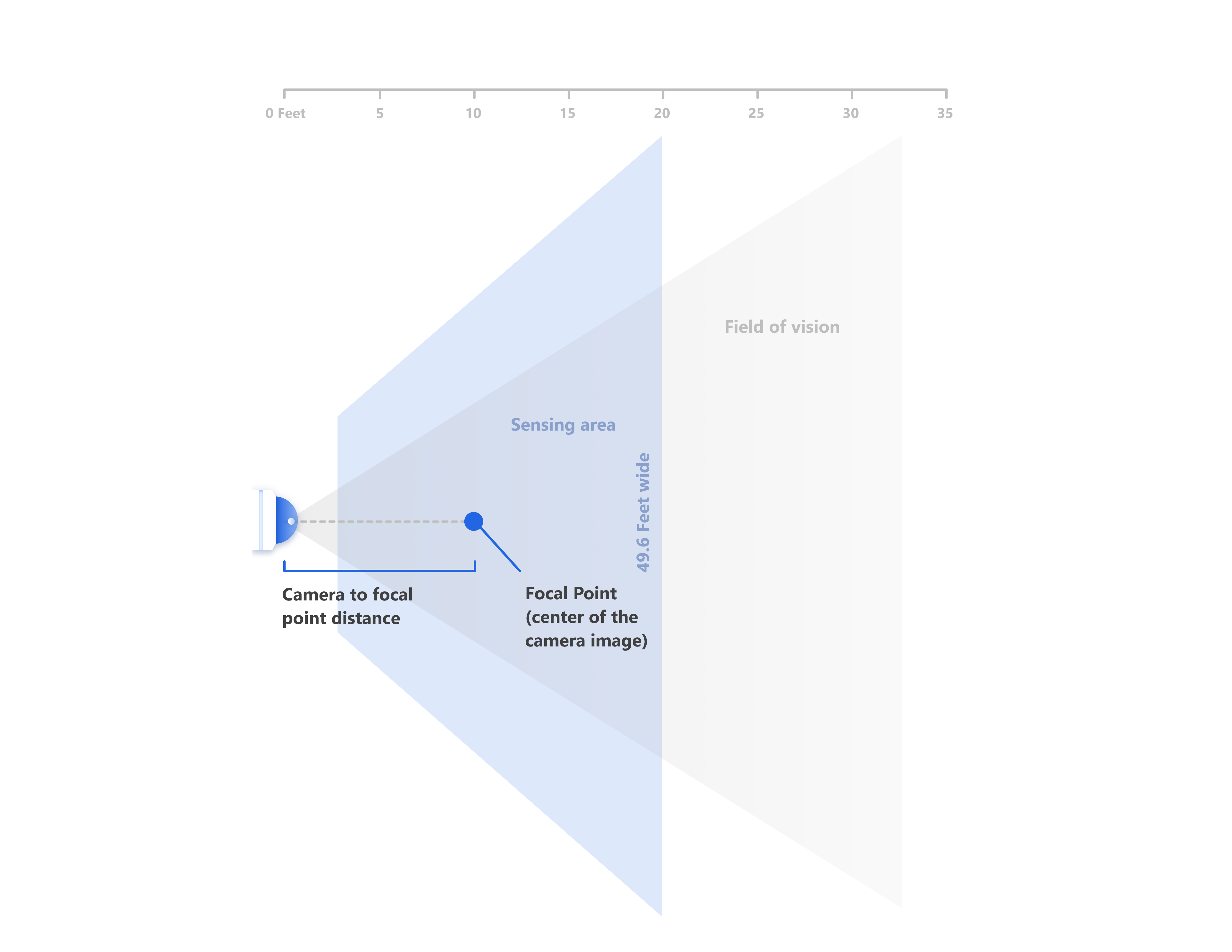
Dall'alto, l'aspetto sarà simile al seguente:
Usare la tabella seguente per determinare la distanza della fotocamera dal punto focale in base ad altezze di montaggio specifiche. Queste distanze si riferiscono a un posizionamento ottimale. La tabella fornisce indicazioni sotto la raccomandazione 12'-14' perché alcuni soffitti possono limitare l'altezza. Per il rilevamento delle mascherine, la distanza consigliata tra fotocamera e punto focale (min/max) è pari a 4'-10' per un'altezza della fotocamera compresa tra 8' e 12'.
| Altezza della fotocamera | Distanza tra fotocamera e punto focale (min/max) |
|---|---|
| 8' | 4,6'-8' |
| 10' | 5,8'-10' |
| 12' | 7'-12' |
| 14' | 8'-14' |
| 16' | 9,2'-16' |
| 20' | 11,5'-20' |
La figura seguente simula la visuale delle fotocamere da distanze tra fotocamera e punto focale più vicine e più lontane.
| Più vicino | Più lontano |
|---|---|

|

|
Intervalli di montaggio per l'angolazione della fotocamera
In questa sezione sono descritti gli intervalli di montaggio accettabili per l'angolazione delle fotocamere. Questi intervalli di montaggio mostrano l'intervallo accettabile per un posizionamento ottimale.
Configurazione lineare
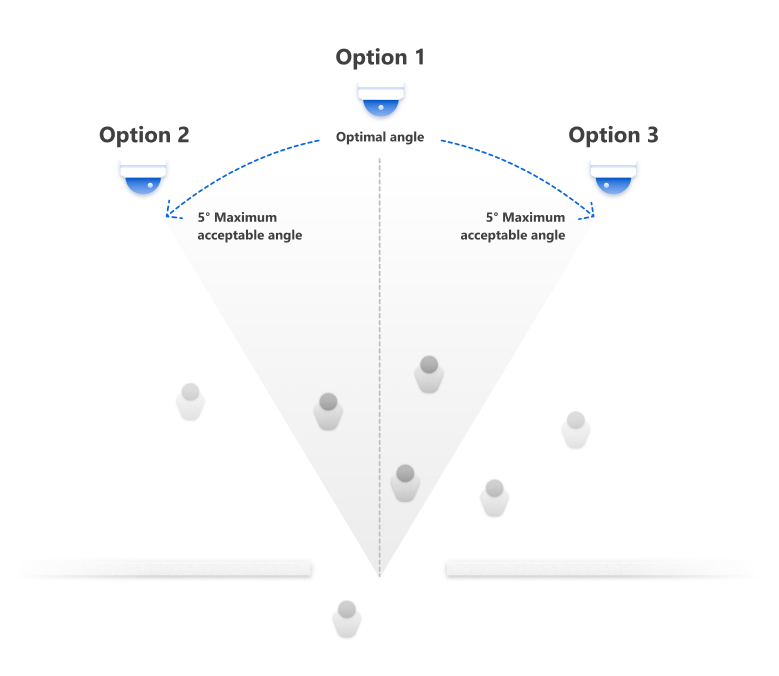
Per l'operazione cognitiveservices.vision.spatialanalysis-personcrossingline, +/-5° è l'angolo di montaggio ottimale della fotocamera per ottimizzare l'accuratezza.
Per il rilevamento delle mascherine, +/-30 gradi è l'angolo di montaggio ottimale della fotocamera per un'altezza della fotocamera da 8' a 12'.
La figura seguente simula le viste della fotocamera in base alle raccomandazioni relative all'angolo di montaggio all'estrema sinistra (-) e all'estrema (+) per l'uso di cognitiveservices.vision.spatialanalysis-personcrossingline per eseguire il conteggio degli ingressi presso un punto d'ingresso.
| Vista all'estrema sinistra | Vista all'estrema destra |
|---|---|

|

|
La figura seguente mostra il posizionamento e l'angolo di montaggio della fotocamera da una vista panoramica (dall'alto).
Configurazione a zona
Ti consigliamo di posizionare telecamere a 10 piedi o più al di sopra del terreno per garantire che l'area coperta sia abbastanza grande.
Quando la zona si trova in prossimità di un ostacolo, ad esempio una parete o una scaffalatura, montare le telecamere in base alla distanza specificata rispetto alla destinazione con un'angolazione avente un intervallo accettabile di 120 gradi, come illustrato nella figura seguente.
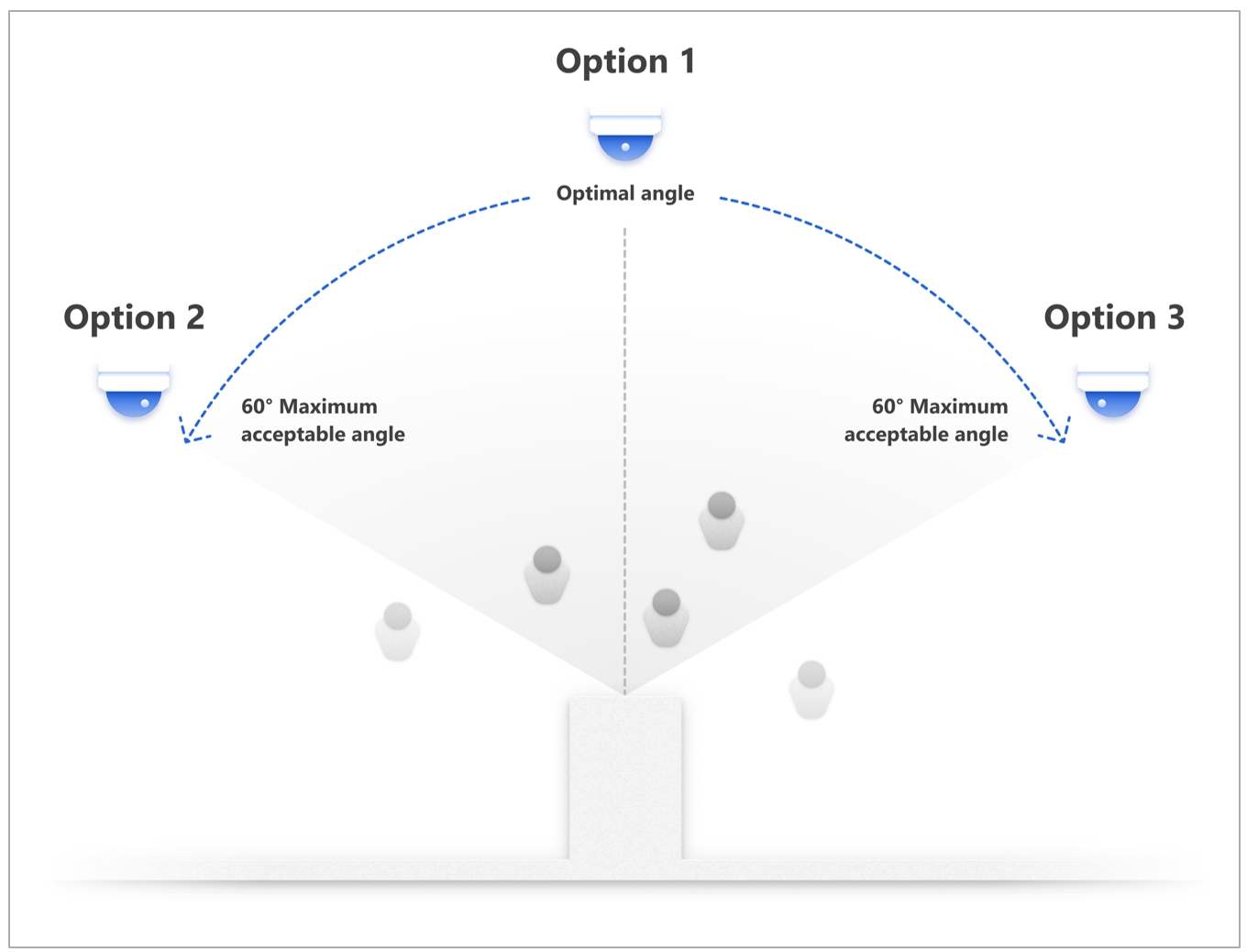
La figura seguente fornisce simulazioni per le viste della fotocamera verso sinistra e verso destra di un'area prossima a scaffalature.
| Vista verso sinistra | Vista verso destra |
|---|---|

|

|
Code
Per monitorare le code, è possibile utilizzare le operazioni cognitiveservices.vision.spatialanalysis-personcount, cognitiveservices.vision.spatialanalysis-persondistance e cognitiveservices.vision.spatialanalysis-personcrossingpolygon. Per una qualità ottimale dei dati relativi alle code, è preferibile usare barriere a nastro retrattile in modo da ridurre al minimo l'assembramento delle persone in coda e garantire che la posizione delle code sia costante nel tempo.
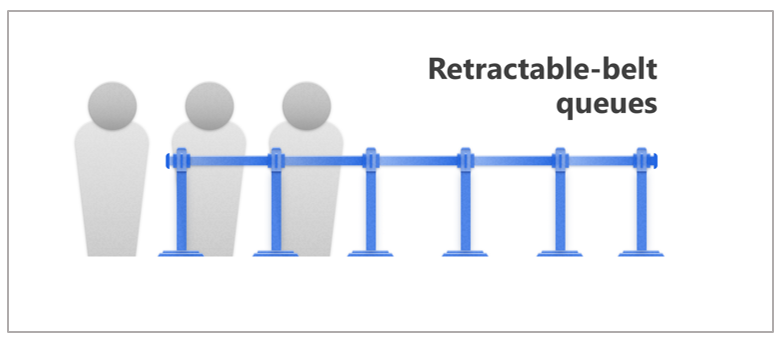
Per la gestione delle code, questo tipo di barriera è preferibile alle barriere opache al fine di massimizzare l'accuratezza dei dati analitici provenienti dal sistema.
Esistono due tipi di code: lineare e a zig-zag.
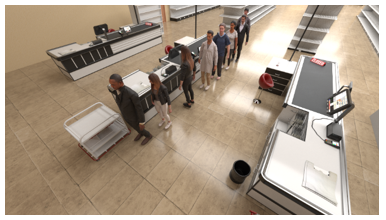
La figura seguente mostra le raccomandazioni per le code lineari:
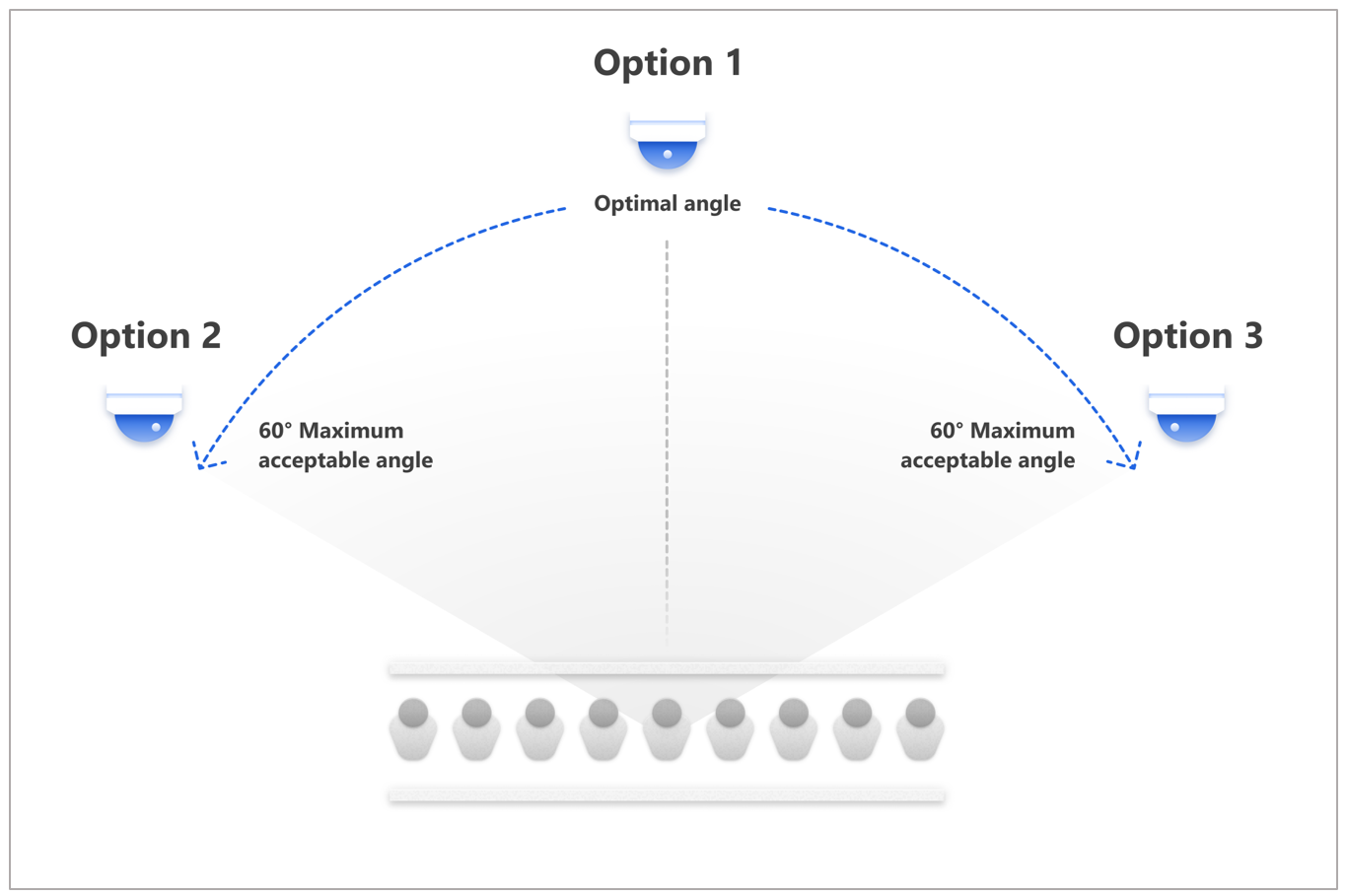
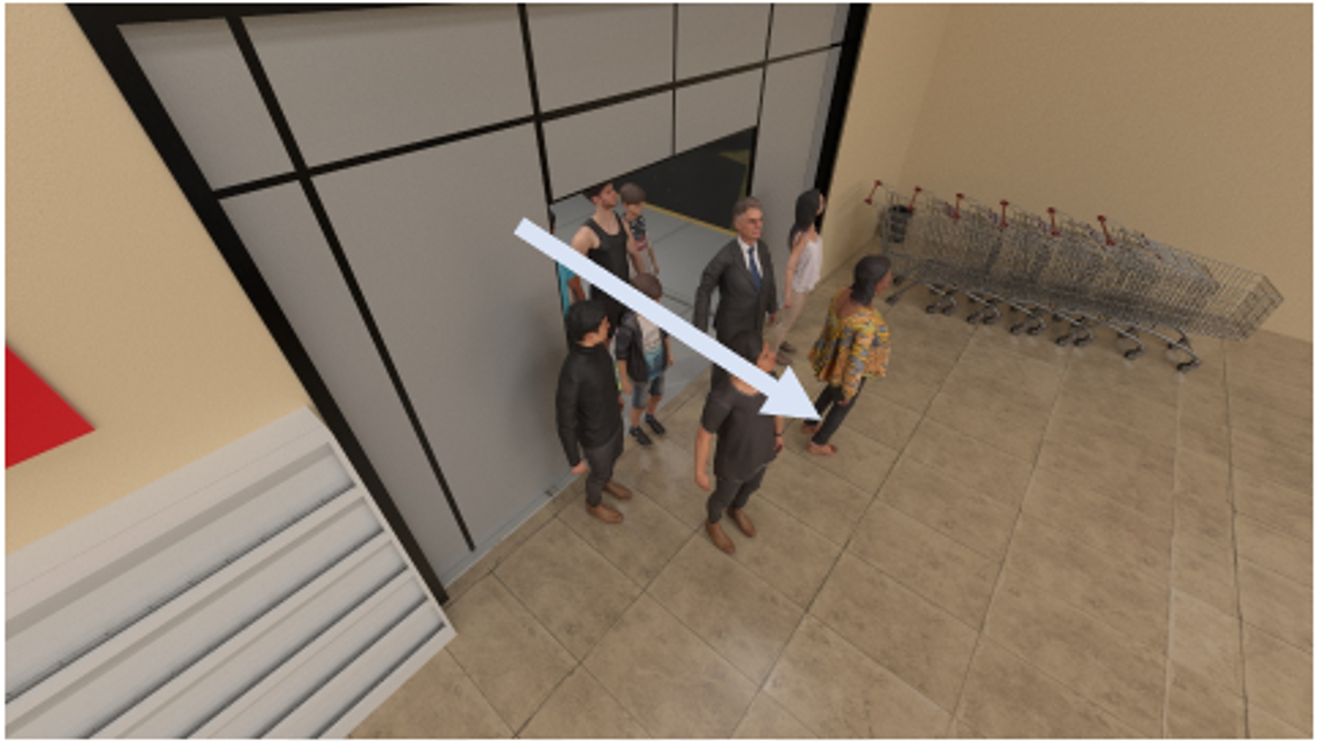
La figura seguente fornisce simulazioni per le viste della fotocamera verso sinistra e verso destra per le code lineari. È possibile montare la fotocamera sul lato opposto della coda.
| Vista verso sinistra | Vista verso destra |
|---|---|

|
|
Per le code a zig-zag, è consigliabile evitare di posizionare la fotocamera direttamente rivolta verso la direzione del senso di marcia della coda, come illustrato nella figura seguente. Ognuna delle quattro posizioni della fotocamera di esempio nell'illustrazione fornisce la visualizzazione ideale con una deviazione accettabile di +/- 15 gradi in ogni direzione.
Le illustrazioni seguenti simulano la vista di una fotocamera montata nelle posizioni ideali per una coda a zig-zag.
| Vista 1 | Vista 2 |
|---|---|

|

|
| Vista 3 | Vista 4 |
|---|---|

|

|
Code organiche
Le code organiche sono linee che si formano in modo organico. Questo stile di coda è accettabile se non sono presenti più di 2-3 persone e se la coda si forma all'interno dell'area definita. Se la lunghezza della coda è in genere superiore a 2-3 persone, è consigliabile usare una barriera a nastro retrattile per indirizzare il senso di marcia della coda e assicurarsi che la coda si formi all'interno dell'area definita.