geo_azimuth()
S’applique à : ✅Microsoft Fabric✅Azure Data Explorer✅Azure Monitor✅Microsoft Sentinel
Calcule l’angle de l’horloge en radians entre la ligne de point1 à vrai nord et une ligne de point1 à point2 sur la Terre.
Syntaxe
geo_azimuth(,p1_longitude p1_latitude,p2_longitude p2_latitude,)
En savoir plus sur les conventions de syntaxe.
Paramètres
| Nom | Type | Requise | Description |
|---|---|---|---|
| p1_longitude | real |
✔️ | Valeur de longitude en degrés de la première coordonnée géospatiale. Une valeur valide se trouve dans la plage [-180, +180]. |
| p1_latitude | real |
✔️ | Valeur de latitude en degrés de la première coordonnée géospatiale. Une valeur valide se trouve dans la plage [-90, +90]. |
| p2_longitude | real |
✔️ | Valeur de longitude en degrés de la deuxième coordonnée géospatiale. Une valeur valide se trouve dans la plage [-180, +180]. |
| p2_latitude | real |
✔️ | Valeur de latitude en degrés de la deuxième coordonnée géospatiale. Une valeur valide se trouve dans la plage [-90, +90]. |
Retours
Angle en radians entre la ligne de point p1 à vrai nord et la ligne [p1, p2]. L’angle est mesuré dans le sens des aiguilles d’une montre.
Remarque
- Les coordonnées géospatiales sont interprétées comme représentées par le système de référence de coordonnées WGS-84 .
- La référence géodésique utilisée pour mesurer la distance sur terre est une sphère. Les bords de ligne sont géodésiques sur la sphère.
- Azimuth 0 points nord. Azimuth Pi/2 points à l’est. Azimuth Pi pointe vers le sud. Azimuth 3Pi/2 points ouest.
- Si les coordonnées ne sont pas valides, la requête produit un résultat null.
- Si point1 est égal à point2, la requête produit un résultat null.
- Si point1 et point2 sont antipodaux, la requête produit un résultat null.
Exemples
L’exemple suivant calcule l’azimuth en radians.
print azimuth_in_radians = geo_azimuth(5, 10, 10, -40)
Sortie
| azimuth_in_radians |
|---|
| 3.05459939796449 |
L’exemple suivant calcule l’azimuth en degrés.
let azimuth_in_radians = geo_azimuth(5, 10, 10, -40);
print azimuth_in_degrees = degrees(azimuth_in_radians);
Sortie
| azimuth_in_degrees |
|---|
| 175.015653606568 |
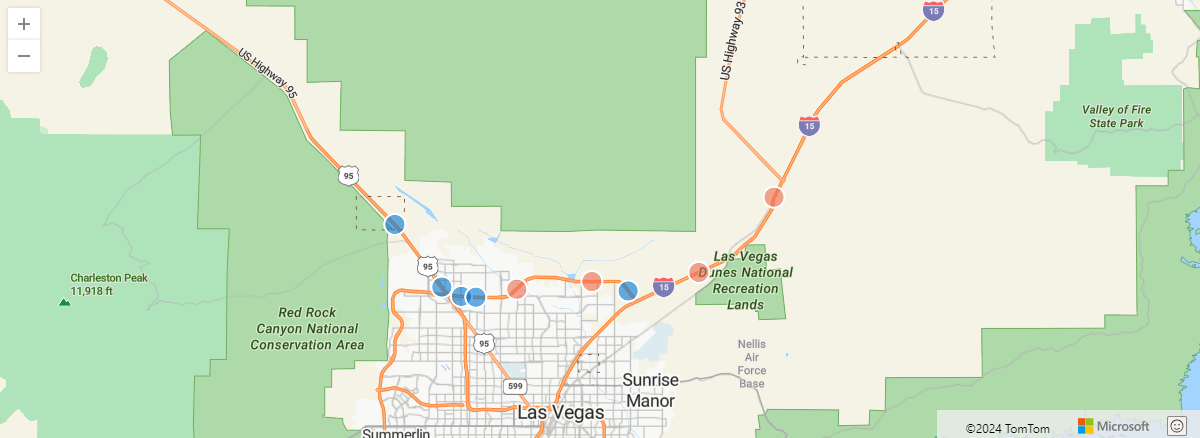
L’exemple suivant considère un camion qui émet des données de télémétrie de son emplacement pendant qu’il se déplace et recherche son sens du trajet.
let get_direction = (azimuth:real)
{
let pi = pi();
iff(azimuth < pi/2, "North-East",
iff(azimuth < pi, "South-East",
iff(azimuth < 3*pi/2, "South-West",
"North-West")));
};
datatable(timestamp:datetime, lng:real, lat:real)
[
datetime(2024-01-01T00:01:53.048506Z), -115.4036607693417, 36.40551631046261,
datetime(2024-01-01T00:02:53.048506Z), -115.3256807623232, 36.34102142760111,
datetime(2024-01-01T00:03:53.048506Z), -115.2732290602112, 36.28458914829917,
datetime(2024-01-01T00:04:53.048506Z), -115.2513186233914, 36.27622394664352,
datetime(2024-01-01T00:05:53.048506Z), -115.2352055633212, 36.27545547038515,
datetime(2024-01-01T00:06:53.048506Z), -115.1894341934856, 36.28266934431671,
datetime(2024-01-01T00:07:53.048506Z), -115.1054318118468, 36.28957085435267,
datetime(2024-01-01T00:08:53.048506Z), -115.0648614339413, 36.28110743285072,
datetime(2024-01-01T00:09:53.048506Z), -114.9858032867736, 36.29780696509714,
datetime(2024-01-01T00:10:53.048506Z), -114.9016966527561, 36.36556196813566,
]
| sort by timestamp asc
| extend prev_lng = prev(lng), prev_lat = prev(lat)
| where isnotnull(prev_lng) and isnotnull(prev_lat)
| extend direction = get_direction(geo_azimuth(prev_lng, prev_lat, lng, lat))
| project direction, lng, lat
| render scatterchart with (kind = map)
Sortie
L’exemple suivant retourne true , car le premier point est égal au deuxième point.
print is_null = isnull(geo_azimuth(5, 10, 5, 10))
Sortie
| is_null |
|---|
| true |