Simulación de percepción
¿Desea crear una prueba automatizada para la aplicación? ¿Desea que las pruebas vayan más allá de las pruebas unitarias de nivel de componente y realmente realicen ejercicios de un extremo a otro en la aplicación? La simulación de percepción es lo que está buscando. La biblioteca Perception Simulation envía datos de entrada humanos y mundiales a la aplicación para que pueda automatizar las pruebas. Por ejemplo, puede simular la entrada de un humano que busca una posición específica repetible y, a continuación, usar un controlador de gestos o movimiento.
Perception Simulation puede enviar una entrada simulada como esta a un HoloLens físico, el emulador de HoloLens (primera generación), el emulador de HoloLens 2 o un equipo con el Portal de realidad mixta instalado. Perception Simulation omite los sensores activos en un dispositivo de Realidad mixta y envía una entrada simulada a las aplicaciones que se ejecutan en el dispositivo. Las aplicaciones reciben estos eventos de entrada a través de las mismas API que siempre usan y no pueden indicar la diferencia entre ejecutarse con sensores reales frente a La simulación de percepción. Perception Simulation es la misma tecnología que usan los emuladores de HoloLens para enviar entradas simuladas a la máquina virtual de HoloLens.
Para empezar a usar la simulación en el código, empiece por crear un objeto IPerceptionSimulationManager. Desde ese objeto, puede emitir comandos para controlar las propiedades de un "humano" simulado, incluida la posición de la cabeza, la posición de la mano y los gestos. También puede habilitar y manipular controladores de movimiento.
Configuración de un proyecto de Visual Studio para la simulación de percepción
Instale el emulador de HoloLens en el equipo de desarrollo. El emulador incluye las bibliotecas que usa para Perception Simulation.
Cree un nuevo proyecto de escritorio de Visual Studio C# (un proyecto de consola funciona bien para empezar).
Agregue los archivos binarios siguientes al proyecto como referencias (Project-Add-Reference>>...). Puede encontrarlos en %ProgramFiles(x86)%\Microsoft XDE\(version), como %ProgramFiles(x86)%\Microsoft XDE\10.0.18362.0 para el emulador de HoloLens 2.
Nota:
Aunque los archivos binarios forman parte del emulador de HoloLens 2, también funcionan para Windows Mixed Reality en el escritorio).
a. PerceptionSimulationManager.Interop.dll: contenedor de C# administrado para la simulación de percepción.
b. PerceptionSimulationRest.dll: biblioteca para configurar un canal de comunicación de socket web en HoloLens o emulador.
c. SimulationStream.Interop.dll: tipos compartidos para la simulación.Agregar el PerceptionSimulationManager.dll binario de implementación al proyecto
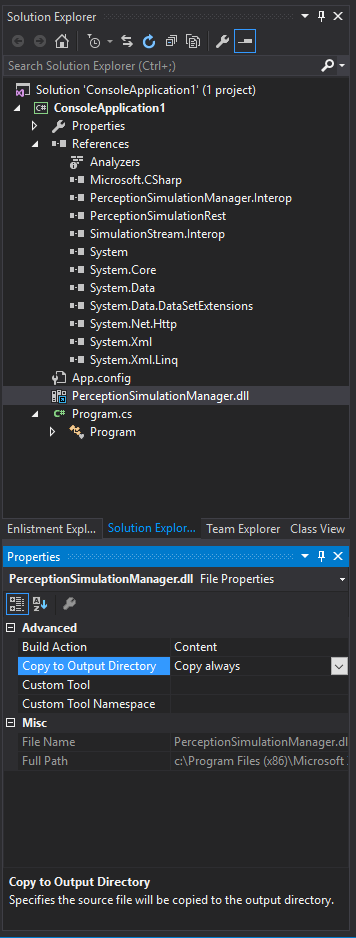
a. En primer lugar, agréguelo como binario al proyecto (Project-Add-Existing>> Item...). Guárdelo como un vínculo para que no lo copie en la carpeta de origen del proyecto.
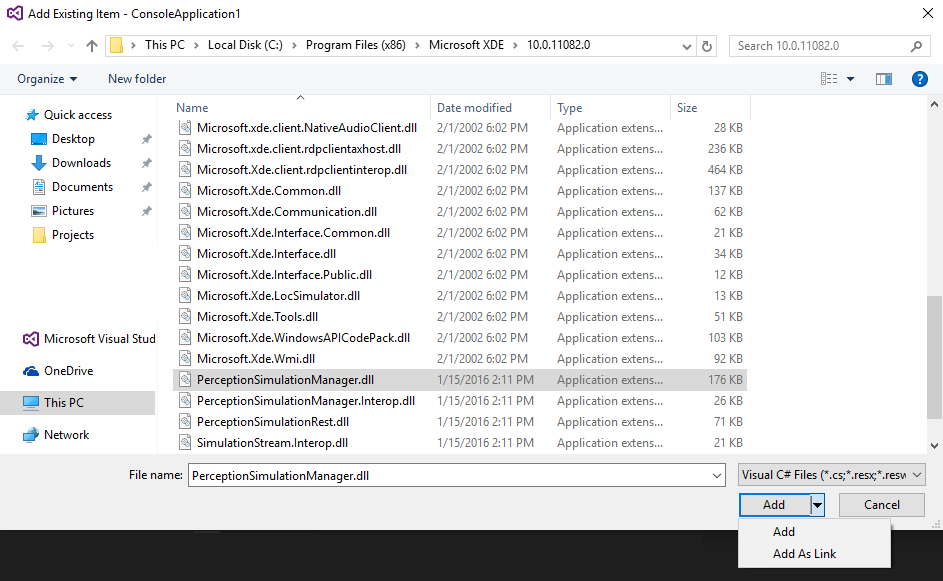
b. A continuación, asegúrese de que se copia en la carpeta de salida en la compilación. Esto se encuentra en la hoja de propiedades del archivo binario.
Establezca la plataforma de solución activa en x64. (Use Configuration Manager para crear una entrada de plataforma para x64 si aún no existe).
Creación de un objeto IPerceptionSimulation Manager
Para controlar la simulación, emitirá actualizaciones a los objetos recuperados de un objeto IPerceptionSimulationManager. El primer paso es obtener ese objeto y conectarlo al dispositivo o emulador de destino. Para obtener la dirección IP del emulador, haga clic en el botón Portal de dispositivos de la barra de herramientas.
 Abra El Portal de dispositivos: abra el Portal de dispositivos Windows para el sistema operativo HoloLens en el emulador. Para Windows Mixed Reality, esto se puede recuperar en la aplicación Configuración en "Actualizar y seguridad", luego "Para desarrolladores" en la sección "Conectar con:" en "Habilitar portal de dispositivos". Asegúrese de anotar tanto la dirección IP como el puerto.
Abra El Portal de dispositivos: abra el Portal de dispositivos Windows para el sistema operativo HoloLens en el emulador. Para Windows Mixed Reality, esto se puede recuperar en la aplicación Configuración en "Actualizar y seguridad", luego "Para desarrolladores" en la sección "Conectar con:" en "Habilitar portal de dispositivos". Asegúrese de anotar tanto la dirección IP como el puerto.
En primer lugar, llamará a RestSimulationStreamSink.Create para obtener un objeto RestSimulationStreamSink. Este es el dispositivo o emulador de destino que controlará sobre una conexión HTTP. Los comandos se pasarán y controlarán mediante el Portal de dispositivos Windows que se ejecuta en el dispositivo o emulador. Los cuatro parámetros que necesitará para crear un objeto son:
- URI URI: dirección IP del dispositivo de destino (por ejemplo, "https://123.123.123.123" o "https://123.123.123.123:50080")
- Credenciales system.Net.NetworkCredential: nombre de usuario y contraseña para conectarse al Portal de dispositivos Windows en el dispositivo o emulador de destino. Si se conecta al emulador a través de su dirección local (por ejemplo, 168... *) en el mismo equipo, se aceptarán todas las credenciales.
- bool normal: true para la prioridad normal, false para prioridad baja. Por lo general, quiere establecer esto en true para escenarios de prueba, lo que permite que la prueba tome el control. El emulador y la simulación de Windows Mixed Reality usan conexiones de prioridad baja. Si la prueba también usa una conexión de prioridad baja, la conexión establecida más recientemente estará en control.
- Token System.Threading.CancellationToken: token para cancelar la operación asincrónica.
En segundo lugar, creará IPerceptionSimulationManager. Este es el objeto que se usa para controlar la simulación. Esto también debe hacerse en un método asincrónico.
Controlar el ser humano simulado
IPerceptionSimulationManager tiene una propiedad Human que devuelve un objeto ISimulatedHuman. Para controlar el humano simulado, realice operaciones en este objeto. Por ejemplo:
manager.Human.Move(new Vector3(0.1f, 0.0f, 0.0f))
Aplicación de consola de C# de ejemplo básica
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading;
using System.Threading.Tasks;
using Microsoft.PerceptionSimulation;
namespace ConsoleApplication1
{
class Program
{
static void Main(string[] args)
{
Task.Run(async () =>
{
RestSimulationStreamSink sink = null;
CancellationToken token = new System.Threading.CancellationToken();
try
{
sink = await RestSimulationStreamSink.Create(
// use the IP address for your device/emulator
new Uri("https://169.254.227.115"),
// no credentials are needed for the emulator
new System.Net.NetworkCredential("", ""),
// normal priorty
true,
// cancel token
token);
IPerceptionSimulationManager manager = PerceptionSimulationManager.CreatePerceptionSimulationManager(sink);
}
catch (Exception e)
{
Console.WriteLine(e);
}
// Always close the sink to return control to the previous application.
if (sink != null)
{
await sink.Close(token);
}
});
// If main exits, the process exits.
Console.WriteLine("Press any key to exit...");
Console.ReadLine();
}
}
}
Aplicación de consola de C# de ejemplo extendida
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading;
using System.Threading.Tasks;
using Microsoft.PerceptionSimulation;
namespace ConsoleApplication1
{
class Program
{
static void Main(string[] args)
{
RestSimulationStreamSink sink = null;
CancellationToken token = new System.Threading.CancellationToken();
Task.Run(async () =>
{
try
{
sink = await RestSimulationStreamSink.Create(
// use the IP address for your device/emulator
new Uri("https://169.254.227.115"),
// no credentials are needed for the emulator
new System.Net.NetworkCredential("", ""),
// normal priorty
true,
// cancel token
token);
IPerceptionSimulationManager manager = PerceptionSimulationManager.CreatePerceptionSimulationManager(sink);
// Now, we'll simulate a sequence of actions.
// Sleeps in-between each action give time to the system
// to be able to properly react.
// This is just an example. A proper automated test should verify
// that the app has behaved correctly
// before proceeding to the next step, instead of using Sleeps.
// Activate the right hand
manager.Human.RightHand.Activated = true;
// Simulate Bloom gesture, which should cause Shell to disappear
manager.Human.RightHand.PerformGesture(SimulatedGesture.Home);
Thread.Sleep(2000);
// Simulate Bloom gesture again... this time, Shell should reappear
manager.Human.RightHand.PerformGesture(SimulatedGesture.Home);
Thread.Sleep(2000);
// Simulate a Head rotation down around the X axis
// This should cause gaze to aim about the center of the screen
manager.Human.Head.Rotate(new Rotation3(0.04f, 0.0f, 0.0f));
Thread.Sleep(300);
// Simulate a finger press & release
// Should cause a tap on the center tile, thus launching it
manager.Human.RightHand.PerformGesture(SimulatedGesture.FingerPressed);
Thread.Sleep(300);
manager.Human.RightHand.PerformGesture(SimulatedGesture.FingerReleased);
Thread.Sleep(2000);
// Simulate a second finger press & release
// Should activate the app that was launched when the center tile was clicked
manager.Human.RightHand.PerformGesture(SimulatedGesture.FingerPressed);
Thread.Sleep(300);
manager.Human.RightHand.PerformGesture(SimulatedGesture.FingerReleased);
Thread.Sleep(5000);
// Simulate a Head rotation towards the upper right corner
manager.Human.Head.Rotate(new Rotation3(-0.14f, 0.17f, 0.0f));
Thread.Sleep(300);
// Simulate a third finger press & release
// Should press the Remove button on the app
manager.Human.RightHand.PerformGesture(SimulatedGesture.FingerPressed);
Thread.Sleep(300);
manager.Human.RightHand.PerformGesture(SimulatedGesture.FingerReleased);
Thread.Sleep(2000);
// Simulate Bloom gesture again... bringing the Shell back once more
manager.Human.RightHand.PerformGesture(SimulatedGesture.Home);
Thread.Sleep(2000);
}
catch (Exception e)
{
Console.WriteLine(e);
}
});
// If main exits, the process exits.
Console.WriteLine("Press any key to exit...");
Console.ReadLine();
// Always close the sink to return control to the previous application.
if (sink != null)
{
sink.Close(token);
}
}
}
}
Nota sobre los controladores de 6 DOF
Antes de llamar a las propiedades de los métodos en un controlador dof simulado de 6 DOF, debe activar el controlador. Si no lo hace, se producirá una excepción. A partir de la Actualización de mayo de 2019 de Windows 10, los controladores simulados de 6 DOF se pueden instalar y activar estableciendo la propiedad Status en el objeto ISimulatedSixDofController en SimulatedSixDofControllerStatus.Active. En el Actualización de octubre de 2018 de Windows 10 y versiones anteriores, primero debe instalar un controlador simulado de 6 DOF llamando a la herramienta PerceptionSimulationDevice ubicada en la carpeta \Windows\System32. El uso de esta herramienta es el siguiente:
PerceptionSimulationDevice.exe <action> 6dof <instance>
Por ejemplo
PerceptionSimulationDevice.exe i 6dof 1
Las acciones admitidas son:
- i = install
- q = query
- r = remove
Las instancias admitidas son:
- 1 = el controlador 6-DOF izquierdo
- 2 = el controlador 6-DOF derecho
El código de salida del proceso indicará que se ha realizado correctamente (un valor devuelto cero) o un error (un valor devuelto distinto de cero). Cuando se usa la acción "q" para consultar si se instala un controlador, el valor devuelto será cero (0) si el controlador aún no está instalado o uno (1) si el controlador está instalado.
Al quitar un controlador en el Actualización de octubre de 2018 de Windows 10 o versiones anteriores, establezca primero su estado en Desactivado a través de la API y, a continuación, llame a la herramienta PerceptionSimulationDevice.
Esta herramienta debe ejecutarse como administrador.
Referencia de API
Microsoft.PerceptionSimulation.SimulatedDeviceType
Describe un tipo de dispositivo simulado.
public enum SimulatedDeviceType
{
Reference = 0
}
Microsoft.PerceptionSimulation.SimulatedDeviceType.Reference
Un dispositivo de referencia ficticio, el valor predeterminado de PerceptionSimulationManager
Microsoft.PerceptionSimulation.HeadTrackerMode
Describe un modo de seguimiento de cabeza
public enum HeadTrackerMode
{
Default = 0,
Orientation = 1,
Position = 2
}
Microsoft.PerceptionSimulation.HeadTrackerMode.Default
Seguimiento de encabezado predeterminado. Esto significa que el sistema puede seleccionar el mejor modo de seguimiento de cabeza en función de las condiciones del tiempo de ejecución.
Microsoft.PerceptionSimulation.HeadTrackerMode.Orientation
Orientación sólo seguimiento de la cabeza. Esto significa que la posición con seguimiento puede no ser confiable y es posible que algunas funciones dependientes de la posición de la cabeza no estén disponibles.
Microsoft.PerceptionSimulation.HeadTrackerMode.Position
Seguimiento de la cabeza posicional. Esto significa que la posición y la orientación de la cabeza con seguimiento son confiables.
Microsoft.PerceptionSimulation.SimulatedGesture
Describe un gesto simulado
public enum SimulatedGesture
{
None = 0,
FingerPressed = 1,
FingerReleased = 2,
Home = 4,
Max = Home
}
Microsoft.PerceptionSimulation.SimulatedGesture.None
Valor centinela usado para indicar que no hay gestos.
Microsoft.PerceptionSimulation.SimulatedGesture.FingerPressed
Gesto presionado con el dedo.
Microsoft.PerceptionSimulation.SimulatedGesture.FingerReleased
Gesto liberado de dedo.
Microsoft.PerceptionSimulation.SimulatedGesture.Home
Gesto de inicio o sistema.
Microsoft.PerceptionSimulation.SimulatedGesture.Max
Gesto válido máximo.
Microsoft.PerceptionSimulation.SimulatedSixDofControllerStatus
Los posibles estados de un controlador 6-DOF simulado.
public enum SimulatedSixDofControllerStatus
{
Off = 0,
Active = 1,
TrackingLost = 2,
}
Microsoft.PerceptionSimulation.SimulatedSixDofControllerStatus.Off
El controlador 6-DOF está desactivado.
Microsoft.PerceptionSimulation.SimulatedSixDofControllerStatus.Active
El controlador 6-DOF está activado y seguido.
Microsoft.PerceptionSimulation.SimulatedSixDofControllerStatus.TrackingLost
El controlador 6-DOF está activado, pero no se puede realizar el seguimiento.
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton
Los botones admitidos en un controlador DOF simulado.
public enum SimulatedSixDofControllerButton
{
None = 0,
Home = 1,
Menu = 2,
Grip = 4,
TouchpadPress = 8,
Select = 16,
TouchpadTouch = 32,
Thumbstick = 64,
Max = Thumbstick
}
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.None
Valor centinela usado para indicar que no hay botones.
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.Home
Se presiona el botón Inicio.
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.Menu
Se presiona el botón Menú.
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.Grip
Se presiona el botón De agarre.
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.TouchpadPress
El TouchPad está presionado.
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.Select
Se presiona el botón Seleccionar.
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.TouchpadTouch
TouchPad está táctil.
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.Thumbstick
El stick pulgar se presiona.
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.Max
Botón válido máximo.
Microsoft.PerceptionSimulation.SimulatedEyesCalibrationState
Estado de calibración de los ojos simulados
public enum SimulatedGesture
{
Unavailable = 0,
Ready = 1,
Configuring = 2,
UserCalibrationNeeded = 3
}
Microsoft.PerceptionSimulation.SimulatedEyesCalibrationState.Unavailable
La calibración de los ojos no está disponible.
Microsoft.PerceptionSimulation.SimulatedEyesCalibrationState.Ready
Los ojos se han calibrado. Este es el valor predeterminado.
Microsoft.PerceptionSimulation.SimulatedEyesCalibrationState.Configuring
Los ojos se están calibrando.
Microsoft.PerceptionSimulation.SimulatedEyesCalibrationState.UserCalibrationNeeded
Los ojos deben calibrarse.
Microsoft.PerceptionSimulation.SimulatedHandJointTrackingAccuracy
Precisión de seguimiento de una articulación de la mano.
public enum SimulatedHandJointTrackingAccuracy
{
Unavailable = 0,
Approximate = 1,
Visible = 2
}
Microsoft.PerceptionSimulation.SimulatedHandJointTrackingAccuracy.Unavailable
No se realiza un seguimiento de la articulación.
Microsoft.PerceptionSimulation.SimulatedHandJointTrackingAccuracy.Approximate
La posición de la articulación se deduce.
Microsoft.PerceptionSimulation.SimulatedHandJointTrackingAccuracy.Visible
Se realiza un seguimiento completo de la articulación.
Microsoft.PerceptionSimulation.SimulatedHandPose
Precisión de seguimiento de una articulación de la mano.
public enum SimulatedHandPose
{
Closed = 0,
Open = 1,
Point = 2,
Pinch = 3,
Max = Pinch
}
Microsoft.PerceptionSimulation.SimulatedHandPose.Closed
Las articulaciones de los dedos de la mano están configuradas para reflejar una posición cerrada.
Microsoft.PerceptionSimulation.SimulatedHandPose.Open
Las articulaciones del dedo de la mano están configuradas para reflejar una posición abierta.
Microsoft.PerceptionSimulation.SimulatedHandPose.Point
Las articulaciones del dedo de la mano están configuradas para reflejar una posición apuntando.
Microsoft.PerceptionSimulation.SimulatedHandPose.Pinch
Las articulaciones de los dedos de la mano están configuradas para reflejar una posición de pellizco.
Microsoft.PerceptionSimulation.SimulatedHandPose.Max
Valor válido máximo para SimulatedHandPose.
Microsoft.PerceptionSimulation.PlaybackState
Describe el estado de una reproducción.
public enum PlaybackState
{
Stopped = 0,
Playing = 1,
Paused = 2,
End = 3,
}
Microsoft.PerceptionSimulation.PlaybackState.Stopped
La grabación está detenida y lista para su reproducción.
Microsoft.PerceptionSimulation.PlaybackState.Playing
La grabación se está reproduciendo actualmente.
Microsoft.PerceptionSimulation.PlaybackState.Paused
La grabación está actualmente en pausa.
Microsoft.PerceptionSimulation.PlaybackState.End
La grabación ha llegado al final.
Microsoft.PerceptionSimulation.Vector3
Describe un vector de tres componentes, que podría describir un punto o un vector en el espacio 3D.
public struct Vector3
{
public float X;
public float Y;
public float Z;
public Vector3(float x, float y, float z);
}
Microsoft.PerceptionSimulation.Vector3.X
Componente X del vector.
Microsoft.PerceptionSimulation.Vector3.Y
Componente Y del vector.
Microsoft.PerceptionSimulation.Vector3.Z
Componente Z del vector.
Microsoft.PerceptionSimulation.Vector3.#ctor(System.Single,System.Single,System.Single,System.Single)
Construya un nuevo vector3.
Parámetros
- x: componente x del vector.
- y: componente y del vector.
- z: componente z del vector.
Microsoft.PerceptionSimulation.Rotation3
Describe una rotación de tres componentes.
public struct Rotation3
{
public float Pitch;
public float Yaw;
public float Roll;
public Rotation3(float pitch, float yaw, float roll);
}
Microsoft.PerceptionSimulation.Rotation3.Pitch
Componente Pitch del Giro, hacia abajo alrededor del eje X.
Microsoft.PerceptionSimulation.Rotation3.Yaw
Componente Yaw del giro, justo alrededor del eje Y.
Microsoft.PerceptionSimulation.Rotation3.Roll
Componente Roll del giro, justo alrededor del eje Z.
Microsoft.PerceptionSimulation.Rotation3.#ctor(System.Single,System.Single,System.Single,System.Single)
Construya un nuevo Rotation3.
Parámetros
- pitch: componente de inclinación de la rotación.
- yaw: componente de la rotación.
- roll: el componente roll de la rotación.
Microsoft.PerceptionSimulation.SimulatedHandJointConfiguration
Describe la configuración de una articulación en una mano simulada.
public struct SimulatedHandJointConfiguration
{
public Vector3 Position;
public Rotation3 Rotation;
public SimulatedHandJointTrackingAccuracy TrackingAccuracy;
}
Microsoft.PerceptionSimulation.SimulatedHandJointConfiguration.Position
Posición de la articulación.
Microsoft.PerceptionSimulation.SimulatedHandJointConfiguration.Rotation
Rotación de la articulación.
Microsoft.PerceptionSimulation.SimulatedHandJointConfiguration.TrackingAccuracy
Precisión de seguimiento de la articulación.
Microsoft.PerceptionSimulation.Frustum
Describe un frustum de vista, como suele usar una cámara.
public struct Frustum
{
float Near;
float Far;
float FieldOfView;
float AspectRatio;
}
Microsoft.PerceptionSimulation.Frustum.Near
Distancia mínima contenida en el frustum.
Microsoft.PerceptionSimulation.Frustum.Far
Distancia máxima contenida en el frustum.
Microsoft.PerceptionSimulation.Frustum.FieldOfView
Campo horizontal de vista del frustum, en radianes (menor que PI).
Microsoft.PerceptionSimulation.Frustum.AspectRatio
Proporción del campo horizontal de vista al campo vertical de la vista.
Microsoft.PerceptionSimulation.SimulatedDisplayConfiguration
Describe la configuración de la pantalla del casco simulado.
public struct SimulatedDisplayConfiguration
{
public Vector3 LeftEyePosition;
public Rotation3 LeftEyeRotation;
public Vector3 RightEyePosition;
public Rotation3 RightEyeRotation;
public float Ipd;
public bool ApplyEyeTransforms;
public bool ApplyIpd;
}
Microsoft.PerceptionSimulation.SimulatedDisplayConfiguration.LeftEyePosition
Transformación desde el centro de la cabeza hasta el ojo izquierdo con fines de representación estéreo.
Microsoft.PerceptionSimulation.SimulatedDisplayConfiguration.LeftEyeRotation
Rotación del ojo izquierdo con fines de representación estéreo.
Microsoft.PerceptionSimulation.SimulatedDisplayConfiguration.RightEyePosition
Transformación desde el centro de la cabeza hasta el ojo derecho con fines de representación estéreo.
Microsoft.PerceptionSimulation.SimulatedDisplayConfiguration.RightEyeRotation
Rotación del ojo derecho con fines de representación estéreo.
Microsoft.PerceptionSimulation.SimulatedDisplayConfiguration.Ipd
Valor ipd notificado por el sistema con fines de representación estéreo.
Microsoft.PerceptionSimulation.SimulatedDisplayConfiguration.ApplyEyeTransforms
Si los valores proporcionados para las transformaciones oculares izquierda y derecha deben considerarse válidos y aplicarse al sistema en ejecución.
Microsoft.PerceptionSimulation.SimulatedDisplayConfiguration.ApplyIpd
Si el valor proporcionado para Ipd debe considerarse válido y aplicarse al sistema en ejecución.
Microsoft.PerceptionSimulation.IPerceptionSimulationManager
Raíz para generar los paquetes usados para controlar un dispositivo.
public interface IPerceptionSimulationManager
{
ISimulatedDevice Device { get; }
ISimulatedHuman Human { get; }
void Reset();
}
Microsoft.PerceptionSimulation.IPerceptionSimulationManager.Device
Recupere el objeto de dispositivo simulado que interpreta el humano simulado y el mundo simulado.
Microsoft.PerceptionSimulation.IPerceptionSimulationManager.Human
Recupere el objeto que controla el ser humano simulado.
Microsoft.PerceptionSimulation.IPerceptionSimulationManager.Reset
Restablece la simulación a su estado predeterminado.
Microsoft.PerceptionSimulation.ISimulatedDevice
Interfaz que describe el dispositivo, que interpreta el mundo simulado y el humano simulado
public interface ISimulatedDevice
{
ISimulatedHeadTracker HeadTracker { get; }
ISimulatedHandTracker HandTracker { get; }
void SetSimulatedDeviceType(SimulatedDeviceType type);
}
Microsoft.PerceptionSimulation.ISimulatedDevice.HeadTracker
Recupere el rastreador de la cabeza del dispositivo simulado.
Microsoft.PerceptionSimulation.ISimulatedDevice.HandTracker
Recupere el rastreador de manos del dispositivo simulado.
Microsoft.PerceptionSimulation.ISimulatedDevice.SetSimulatedDeviceType(Microsoft.PerceptionSimulation.SimulatedDeviceType)
Establezca las propiedades del dispositivo simulado para que coincida con el tipo de dispositivo proporcionado.
Parámetros
- type: el nuevo tipo de dispositivo simulado
Microsoft.PerceptionSimulation.ISimulatedDevice2
Hay propiedades adicionales disponibles mediante la conversión de ISimulatedDevice a ISimulatedDevice2
public interface ISimulatedDevice2
{
bool IsUserPresent { [return: MarshalAs(UnmanagedType.Bool)] get; [param: MarshalAs(UnmanagedType.Bool)] set; }
SimulatedDisplayConfiguration DisplayConfiguration { get; set; }
};
Microsoft.PerceptionSimulation.ISimulatedDevice2.IsUserPresent
Recupere o establezca si el ser humano simulado usa activamente el casco.
Microsoft.PerceptionSimulation.ISimulatedDevice2.DisplayConfiguration
Recupere o establezca las propiedades de la pantalla simulada.
Microsoft.PerceptionSimulation.ISimulatedHeadTracker
Interfaz que describe la parte del dispositivo simulado que realiza un seguimiento del encabezado del humano simulado.
public interface ISimulatedHeadTracker
{
HeadTrackerMode HeadTrackerMode { get; set; }
};
Microsoft.PerceptionSimulation.ISimulatedHeadTracker.HeadTrackerMode
Recupera y establece el modo actual de seguimiento de cabeza.
Microsoft.PerceptionSimulation.ISimulatedHandTracker
Interfaz que describe la parte del dispositivo simulado que realiza un seguimiento de las manos del humano simulado
public interface ISimulatedHandTracker
{
Vector3 WorldPosition { get; }
Vector3 Position { get; set; }
float Pitch { get; set; }
bool FrustumIgnored { [return: MarshalAs(UnmanagedType.Bool)] get; [param: MarshalAs(UnmanagedType.Bool)] set; }
Frustum Frustum { get; set; }
}
Microsoft.PerceptionSimulation.ISimulatedHandTracker.WorldPosition
Recupere la posición del nodo con respecto al mundo, en metros.
Microsoft.PerceptionSimulation.ISimulatedHandTracker.Position
Recupere y establezca la posición del rastreador de manos simulado, en relación con el centro de la cabeza.
Microsoft.PerceptionSimulation.ISimulatedHandTracker.Pitch
Recupere y establezca el tono hacia abajo del rastreador de manos simulado.
Microsoft.PerceptionSimulation.ISimulatedHandTracker.FrustumIgnored
Recupere y establezca si se omite el frustum del rastreador de manos simulado. Cuando se omite, ambas manos siempre están visibles. Cuando no se omiten las manos (el valor predeterminado) solo son visibles cuando están dentro del frustum del rastreador de manos.
Microsoft.PerceptionSimulation.ISimulatedHandTracker.Frustum
Recupere y establezca las propiedades frustum usadas para determinar si las manos son visibles para el rastreador de manos simulado.
Microsoft.PerceptionSimulation.ISimulatedHuman
Interfaz de nivel superior para controlar el ser humano simulado.
public interface ISimulatedHuman
{
Vector3 WorldPosition { get; set; }
float Direction { get; set; }
float Height { get; set; }
ISimulatedHand LeftHand { get; }
ISimulatedHand RightHand { get; }
ISimulatedHead Head { get; }s
void Move(Vector3 translation);
void Rotate(float radians);
}
Microsoft.PerceptionSimulation.ISimulatedHuman.WorldPosition
Recupere y establezca la posición del nodo con respecto al mundo, en metros. La posición corresponde a un punto en el centro de los pies del ser humano.
Microsoft.PerceptionSimulation.ISimulatedHuman.Direction
Recupere y establezca la dirección de las caras humanas simuladas en el mundo. 0 radianes se enfrenta hacia abajo del eje Z negativo. Los radianes positivos giran en el sentido de las agujas del reloj sobre el eje Y.
Microsoft.PerceptionSimulation.ISimulatedHuman.Height
Recupere y establezca la altura del humano simulado, en metros.
Microsoft.PerceptionSimulation.ISimulatedHuman.LeftHand
Recupere la mano izquierda del humano simulado.
Microsoft.PerceptionSimulation.ISimulatedHuman.RightHand
Recupere la mano derecha del humano simulado.
Microsoft.PerceptionSimulation.ISimulatedHuman.Head
Recupere la cabeza del ser humano simulado.
Microsoft.PerceptionSimulation.ISimulatedHuman.Move(Microsoft.PerceptionSimulation.Vector3)
Mueva el humano simulado en relación con su posición actual, en metros.
Parámetros
- translation: la traducción que se va a mover, en relación con la posición actual.
Microsoft.PerceptionSimulation.ISimulatedHuman.Rotate(System.Single)
Girar el humano simulado en relación con su dirección actual, en el sentido de las agujas del reloj sobre el eje Y
Parámetros
- radianes: la cantidad que se va a girar alrededor del eje Y.
Microsoft.PerceptionSimulation.ISimulatedHuman2
Hay propiedades adicionales disponibles mediante la conversión de ISimulatedHuman a ISimulatedHuman2
public interface ISimulatedHuman2
{
/* New members in addition to those available on ISimulatedHuman */
ISimulatedSixDofController LeftController { get; }
ISimulatedSixDofController RightController { get; }
}
Microsoft.PerceptionSimulation.ISimulatedHuman2.LeftController
Recupere el controlador 6-DOF izquierdo.
Microsoft.PerceptionSimulation.ISimulatedHuman2.RightController
Recupere el controlador 6-DOF correcto.
Microsoft.PerceptionSimulation.ISimulatedHand
Interfaz que describe una mano del ser humano simulado
public interface ISimulatedHand
{
Vector3 WorldPosition { get; }
Vector3 Position { get; set; }
bool Activated { [return: MarshalAs(UnmanagedType.Bool)] get; [param: MarshalAs(UnmanagedType.Bool)] set; }
bool Visible { [return: MarshalAs(UnmanagedType.Bool)] get; }
void EnsureVisible();
void Move(Vector3 translation);
void PerformGesture(SimulatedGesture gesture);
}
Microsoft.PerceptionSimulation.ISimulatedHand.WorldPosition
Recupere la posición del nodo con respecto al mundo, en metros.
Microsoft.PerceptionSimulation.ISimulatedHand.Position
Recupere y establezca la posición de la mano simulada en relación con el humano, en metros.
Microsoft.PerceptionSimulation.ISimulatedHand.Activated
Recupere y establezca si la mano está activada actualmente.
Microsoft.PerceptionSimulation.ISimulatedHand.Visible
Recupere si la mano está visible actualmente para SimulatedDevice (es decir, si está en una posición que debe detectar handTracker).
Microsoft.PerceptionSimulation.ISimulatedHand.EnsureVisible
Mueva la mano de modo que sea visible para simulatedDevice.
Microsoft.PerceptionSimulation.ISimulatedHand.Move(Microsoft.PerceptionSimulation.Vector3)
Mueva la posición de la mano simulada en relación con su posición actual, en metros.
Parámetros
- translation: la cantidad que se va a traducir la mano simulada.
Microsoft.PerceptionSimulation.ISimulatedHand.PerformGesture(Microsoft.PerceptionSimulation.SimulatedGesture)
Realice un gesto mediante la mano simulada. El sistema solo lo detectará si la mano está habilitada.
Parámetros
- gesto: el gesto que se va a realizar.
Microsoft.PerceptionSimulation.ISimulatedHand2
Hay propiedades adicionales disponibles mediante la conversión de ISimulatedHand a ISimulatedHand2.
public interface ISimulatedHand2
{
/* New members in addition to those available on ISimulatedHand */
Rotation3 Orientation { get; set; }
}
Microsoft.PerceptionSimulation.ISimulatedHand2.Orientation
Recupere o establezca la rotación de la mano simulada. Los radianes positivos giran en el sentido de las agujas del reloj al mirar a lo largo del eje.
Microsoft.PerceptionSimulation.ISimulatedHand3
Hay propiedades adicionales disponibles mediante la conversión de ISimulatedHand a ISimulatedHand3
public interface ISimulatedHand3
{
/* New members in addition to those available on ISimulatedHand and ISimulatedHand2 */
GetJointConfiguration(SimulatedHandJoint joint, out SimulatedHandJointConfiguration jointConfiguration);
SetJointConfiguration(SimulatedHandJoint joint, SimulatedHandJointConfiguration jointConfiguration);
SetHandPose(SimulatedHandPose pose, bool animate);
}
Microsoft.PerceptionSimulation.ISimulatedHand3.GetJointConfiguration
Obtiene la configuración de la unión para la articulación especificada.
Microsoft.PerceptionSimulation.ISimulatedHand3.SetJointConfiguration
Establezca la configuración de la unión para la articulación especificada.
Microsoft.PerceptionSimulation.ISimulatedHand3.SetHandPose
Establezca la mano en una posición conocida con una marca opcional para animar. Nota: la animación no dará lugar a que las articulaciones reflejen inmediatamente sus configuraciones de articulación finales.
Microsoft.PerceptionSimulation.ISimulatedHead
Interfaz que describe el encabezado del humano simulado.
public interface ISimulatedHead
{
Vector3 WorldPosition { get; }
Rotation3 Rotation { get; set; }
float Diameter { get; set; }
void Rotate(Rotation3 rotation);
}
Microsoft.PerceptionSimulation.ISimulatedHead.WorldPosition
Recupere la posición del nodo con respecto al mundo, en metros.
Microsoft.PerceptionSimulation.ISimulatedHead.Rotation
Recupere la rotación del encabezado simulado. Los radianes positivos giran en el sentido de las agujas del reloj al mirar a lo largo del eje.
Microsoft.PerceptionSimulation.ISimulatedHead.Diameter
Recupere el diámetro de la cabeza simulada. Este valor se usa para determinar el centro del encabezado (punto de rotación).
Microsoft.PerceptionSimulation.ISimulatedHead.Rotate(Microsoft.PerceptionSimulation.Rotation3)
Gire el encabezado simulado en relación con su rotación actual. Los radianes positivos giran en el sentido de las agujas del reloj al mirar a lo largo del eje.
Parámetros
- rotación: la cantidad que se va a girar.
Microsoft.PerceptionSimulation.ISimulatedHead2
Hay propiedades adicionales disponibles mediante la conversión de ISimulatedHead a ISimulatedHead2
public interface ISimulatedHead2
{
/* New members in addition to those available on ISimulatedHead */
ISimulatedEyes Eyes { get; }
}
Microsoft.PerceptionSimulation.ISimulatedHead2.Eyes
Recupere los ojos del humano simulado.
Microsoft.PerceptionSimulation.ISimulatedSixDofController
Interfaz que describe un controlador dof 6 asociado al humano simulado.
public interface ISimulatedSixDofController
{
Vector3 WorldPosition { get; }
SimulatedSixDofControllerStatus Status { get; set; }
Vector3 Position { get; }
Rotation3 Orientation { get; set; }
void Move(Vector3 translation);
void PressButton(SimulatedSixDofControllerButton button);
void ReleaseButton(SimulatedSixDofControllerButton button);
void GetTouchpadPosition(out float x, out float y);
void SetTouchpadPosition(float x, float y);
}
Microsoft.PerceptionSimulation.ISimulatedSixDofController.WorldPosition
Recupere la posición del nodo con respecto al mundo, en metros.
Microsoft.PerceptionSimulation.ISimulatedSixDofController.Status
Recupere o establezca el estado actual del controlador. El estado del controlador debe establecerse en un valor distinto de Desactivado antes de que las llamadas para mover, girar o presionar botones se realizarán correctamente.
Microsoft.PerceptionSimulation.ISimulatedSixDofController.Position
Recupere o establezca la posición del controlador simulado en relación con el humano, en metros.
Microsoft.PerceptionSimulation.ISimulatedSixDofController.Orientation
Recupere o establezca la orientación del controlador simulado.
Microsoft.PerceptionSimulation.ISimulatedSixDofController.Move(Microsoft.PerceptionSimulation.Vector3)
Mueva la posición del controlador simulado con respecto a su posición actual, en metros.
Parámetros
- translation: la cantidad que se va a traducir el controlador simulado.
Microsoft.PerceptionSimulation.ISimulatedSixDofController.PressButton(SimulatedSixDofControllerButton)
Presione un botón en el controlador simulado. El sistema solo lo detectará si el controlador está habilitado.
Parámetros
- button: el botón que se va a presionar.
Microsoft.PerceptionSimulation.ISimulatedSixDofController.ReleaseButton(SimulatedSixDofControllerButton)
Suelte un botón en el controlador simulado. El sistema solo lo detectará si el controlador está habilitado.
Parámetros
- button: el botón que se va a liberar.
Microsoft.PerceptionSimulation.ISimulatedSixDofController.GetTouchpadPosition(out float, out float)
Obtenga la posición de un dedo simulado en el panel táctil del controlador simulado.
Parámetros
- x: posición horizontal del dedo.
- y : posición vertical del dedo.
Microsoft.PerceptionSimulation.ISimulatedSixDofController.SetTouchpadPosition(float, float)
Establezca la posición de un dedo simulado en el panel táctil del controlador simulado.
Parámetros
- x: posición horizontal del dedo.
- y : posición vertical del dedo.
Microsoft.PerceptionSimulation.ISimulatedSixDofController2
Hay disponibles propiedades y métodos adicionales mediante la conversión de ISimulatedSixDofController a ISimulatedSixDofController2
public interface ISimulatedSixDofController2
{
/* New members in addition to those available on ISimulatedSixDofController */
void GetThumbstickPosition(out float x, out float y);
void SetThumbstickPosition(float x, float y);
float BatteryLevel { get; set; }
}
Microsoft.PerceptionSimulation.ISimulatedSixDofController2.GetThumbstickPosition(out float, out float)
Obtenga la posición del stick pulgar simulado en el controlador simulado.
Parámetros
- x: posición horizontal del stick pulgar.
- y : posición vertical del stick pulgar.
Microsoft.PerceptionSimulation.ISimulatedSixDofController2.SetThumbstickPosition(float, float)
Establezca la posición del stick pulgar simulado en el controlador simulado.
Parámetros
- x: posición horizontal del stick pulgar.
- y : posición vertical del stick pulgar.
Microsoft.PerceptionSimulation.ISimulatedSixDofController2.BatteryLevel
Recupere o establezca el nivel de batería del controlador simulado. El valor debe ser mayor que 0,0 y menor o igual que 100,0.
Microsoft.PerceptionSimulation.ISimulatedEyes
Interfaz que describe los ojos del humano simulado.
public interface ISimulatedEyes
{
Rotation3 Rotation { get; set; }
void Rotate(Rotation3 rotation);
SimulatedEyesCalibrationState CalibrationState { get; set; }
Vector3 WorldPosition { get; }
}
Microsoft.PerceptionSimulation.ISimulatedEyes.Rotation
Recupere la rotación de los ojos simulados. Los radianes positivos giran en el sentido de las agujas del reloj al mirar a lo largo del eje.
Microsoft.PerceptionSimulation.ISimulatedEyes.Rotate(Microsoft.PerceptionSimulation.Rotation3)
Gire los ojos simulados en relación con su rotación actual. Los radianes positivos giran en el sentido de las agujas del reloj al mirar a lo largo del eje.
Parámetros
- rotación: la cantidad que se va a girar.
Microsoft.PerceptionSimulation.ISimulatedEyes.CalibrationState
Recupera o establece el estado de calibración de los ojos simulados.
Microsoft.PerceptionSimulation.ISimulatedEyes.WorldPosition
Recupere la posición del nodo con respecto al mundo, en metros.
Microsoft.PerceptionSimulation.ISimulationRecording
Interfaz para interactuar con una sola grabación cargada para la reproducción.
public interface ISimulationRecording
{
StreamDataTypes DataTypes { get; }
PlaybackState State { get; }
void Play();
void Pause();
void Seek(UInt64 ticks);
void Stop();
};
Microsoft.PerceptionSimulation.ISimulationRecording.DataTypes
Recupera la lista de tipos de datos de la grabación.
Microsoft.PerceptionSimulation.ISimulationRecording.State
Recupera el estado actual de la grabación.
Microsoft.PerceptionSimulation.ISimulationRecording.Play
Inicie la reproducción. Si la grabación está en pausa, la reproducción se reanudará desde la ubicación en pausa; si se detiene, la reproducción se iniciará al principio. Si ya se está reproduciendo, se omite esta llamada.
Microsoft.PerceptionSimulation.ISimulationRecording.Pause
Pausa la reproducción en su ubicación actual. Si se detiene la grabación, se omite la llamada.
Microsoft.PerceptionSimulation.ISimulationRecording.Seek(System.UInt64)
Busca la grabación a la hora especificada (en intervalos de 100 nanosegundos desde el principio) y se pausa en esa ubicación. Si el tiempo está más allá del final de la grabación, se pausa en el último fotograma.
Parámetros
- tics: hora a la que se va a buscar.
Microsoft.PerceptionSimulation.ISimulationRecording.Stop
Detiene la reproducción y restablece la posición al principio.
Microsoft.PerceptionSimulation.ISimulationRecordingCallback
Interfaz para recibir cambios de estado durante la reproducción.
public interface ISimulationRecordingCallback
{
void PlaybackStateChanged(PlaybackState newState);
};
Microsoft.PerceptionSimulation.ISimulationRecordingCallback.PlaybackStateChanged(Microsoft.PerceptionSimulation.PlaybackState)
Se llama cuando ha cambiado el estado de reproducción de ISimulationRecording.
Parámetros
- newState: el nuevo estado de la grabación.
Microsoft.PerceptionSimulation.PerceptionSimulationManager
Objeto raíz para crear objetos Perception Simulation.
public static class PerceptionSimulationManager
{
public static IPerceptionSimulationManager CreatePerceptionSimulationManager(ISimulationStreamSink sink);
public static ISimulationStreamSink CreatePerceptionSimulationRecording(string path);
public static ISimulationRecording LoadPerceptionSimulationRecording(string path, ISimulationStreamSinkFactory factory);
public static ISimulationRecording LoadPerceptionSimulationRecording(string path, ISimulationStreamSinkFactory factory, ISimulationRecordingCallback callback);
Microsoft.PerceptionSimulation.PerceptionSimulationManager.CreatePerceptionSimulationManager(Microsoft.PerceptionSimulation.ISimulationStreamSink)
Cree en el objeto para generar paquetes simulados y entregarlos al receptor proporcionado.
Parámetros
- sink: receptor que recibirá todos los paquetes generados.
Valor devuelto
Administrador creado.
Microsoft.PerceptionSimulation.PerceptionSimulationManager.CreatePerceptionSimulationRecording(System.String)
Cree un receptor, que almacena todos los paquetes recibidos en un archivo en la ruta de acceso especificada.
Parámetros
- path: ruta de acceso del archivo que se va a crear.
Valor devuelto
Receptor creado.
Microsoft.PerceptionSimulation.PerceptionSimulationManager.LoadPerceptionSimulationRecording(System.String,Microsoft.PerceptionSimulation.ISimulationStreamSinkFactory)
Cargue una grabación desde el archivo especificado.
Parámetros
- path: ruta de acceso del archivo que se va a cargar.
- factory: un generador usado por la grabación para crear un ISimulationStreamSink cuando sea necesario.
Valor devuelto
Grabación cargada.
Microsoft.PerceptionSimulation.PerceptionSimulationManager.LoadPerceptionSimulationRecording(System.String,Microsoft.PerceptionSimulation.ISimulationStreamSinkFactory,Microsoft.PerceptionSimulation.ISimulationRecordingCallback)
Cargue una grabación desde el archivo especificado.
Parámetros
- path: ruta de acceso del archivo que se va a cargar.
- factory: un generador usado por la grabación para crear un ISimulationStreamSink cuando sea necesario.
- callback: devolución de llamada, que recibe actualizaciones que regrada el estado de la grabación.
Valor devuelto
Grabación cargada.
Microsoft.PerceptionSimulation.StreamDataTypes
Describe los distintos tipos de datos de flujo.
public enum StreamDataTypes
{
None = 0x00,
Head = 0x01,
Hands = 0x02,
SpatialMapping = 0x08,
Calibration = 0x10,
Environment = 0x20,
SixDofControllers = 0x40,
Eyes = 0x80,
DisplayConfiguration = 0x100
All = None | Head | Hands | SpatialMapping | Calibration | Environment | SixDofControllers | Eyes | DisplayConfiguration
}
Microsoft.PerceptionSimulation.StreamDataTypes.None
Valor centinela usado para indicar ningún tipo de datos de flujo.
Microsoft.PerceptionSimulation.StreamDataTypes.Head
Flujo de datos para la posición y orientación de la cabeza.
Microsoft.PerceptionSimulation.StreamDataTypes.Hands
Flujo de datos para la posición y los gestos de las manos.
Microsoft.PerceptionSimulation.StreamDataTypes.SpatialMapping
Flujo de datos para la asignación espacial del entorno.
Microsoft.PerceptionSimulation.StreamDataTypes.Calibration
Flujo de datos para la calibración del dispositivo. Los paquetes de calibración solo son aceptados por un sistema en modo remoto.
Microsoft.PerceptionSimulation.StreamDataTypes.Environment
Flujo de datos para el entorno del dispositivo.
Microsoft.PerceptionSimulation.StreamDataTypes.SixDofControllers
Flujo de datos para controladores de movimiento.
Microsoft.PerceptionSimulation.StreamDataTypes.Eyes
Flujo de datos con los ojos del humano simulado.
Microsoft.PerceptionSimulation.StreamDataTypes.DisplayConfiguration
Flujo de datos con la configuración de visualización del dispositivo.
Microsoft.PerceptionSimulation.StreamDataTypes.All
Valor centinela usado para indicar todos los tipos de datos registrados.
Microsoft.PerceptionSimulation.ISimulationStreamSink
Objeto que recibe paquetes de datos de una secuencia de simulación.
public interface ISimulationStreamSink
{
void OnPacketReceived(uint length, byte[] packet);
}
Microsoft.PerceptionSimulation.ISimulationStreamSink.OnPacketReceived(uint length, byte[] packet)
Recibe un único paquete, que se escribe internamente y tiene versiones.
Parámetros
- length: longitud del paquete.
- packet: los datos del paquete.
Microsoft.PerceptionSimulation.ISimulationStreamSinkFactory
Objeto que crea ISimulationStreamSink.
public interface ISimulationStreamSinkFactory
{
ISimulationStreamSink CreateSimulationStreamSink();
}
Microsoft.PerceptionSimulation.ISimulationStreamSinkFactory.CreateSimulationStreamSink()
Crea una única instancia de ISimulationStreamSink.
Valor devuelto
Receptor creado.