Ejecución de pruebas de sensor de movimiento de HLK
Introducción
Este documento es una guía o un complemento de la documentación y herramientas existentes de HLK 2.0 para los oem de sensores, los OEM y los IHD. Proporciona algunas sugerencias y trucos que un asociado puede aprovechar para ejecutar las pruebas. Los asociados pueden usar otras implementaciones para probar su dispositivo: esta es solo una referencia singular. Los elementos identificados en este documento son opcionales (puede ejecutar las pruebas sin estos elementos de hardware). Simplemente se han utilizado para ayudar a demostrar las orientaciones para los fines de este documento.
En este documento se supone que el HLK 2.0 o superior se usa para probar un sistema de factor de forma de tableta (que requiere sensores de movimiento y luz). Otros factores de forma (por ejemplo, portátiles) están fuera del ámbito de este documento. Aunque las pruebas validan otros sistemas de factor de forma, los detalles siguientes están diseñados principalmente para optimizar las pruebas en sistemas de factor de forma de tableta.
En este documento se describen las siguientes pruebas:
Las pruebas de sensor de movimiento son necesarias para lo siguiente:
Certificación de dispositivos de sensor
Certificación del sistema
La motivación para tener pruebas idénticas en ambas áreas es asegurarse de que los IHD proporcionan hardware, firmware y controladores de paso a los fabricantes de EQUIPOS y que los fabricantes de PC integran correctamente las piezas en sus sistemas para proporcionar lecturas de sensores precisas y confiables.
Propósito de prueba
El propósito principal de las pruebas de sensor de movimiento es ayudar a los asociados de hardware a validar que sus sensores están correctamente orientados en el sistema y que cumplen los requisitos de precisión requeridos de WHLK. Estas pruebas no están diseñadas para proporcionar cobertura completa de pruebas ni para aprovechar los equipos especializados que pueden determinar con mayor precisión las imprecisiones de los sensores individuales. Se recomienda que los fabricantes de equipos prueben sus sistemas con aplicaciones adicionales y pruebas de control de calidad después de superar WHLK (por ejemplo, pruebas con aplicaciones de Windows 8 de calidad de producción).
Secuencia de pruebas recomendada
Microsoft recomienda ejecutar las pruebas en el orden que se muestra en la tabla siguiente. Al probar primero el acelerómetro y el giroscopio, puede asegurarse de que estos sensores básicos funcionan correctamente. El siguiente conjunto de pruebas valida los datos de los sensores Compass, Inclinometer y Orientation derivados mediante la combinación de datos de varios sensores. También se recomienda no intentar ejecutar pruebas posteriores hasta que se superan todas las pruebas anteriores.
| Sensor | Nombre de la prueba | Dependencias |
|---|---|---|
Acelerómetro |
Comprobar la orientación del sensor: acelerómetro 3D |
N/D |
Giroscopio |
Prueba del sensor gyroscope |
N/D |
Brújula |
Comprobar la orientación del sensor- Brújula 3D |
Acelerómetro, Gyro, Compass |
Inclinómetro |
Comprobar la orientación del sensor: inclinómetro |
Acelerómetro, Gyro, Compass |
Sensores de fusión/orientación (matriz de rotación /cuaternión) |
Comprobar sensores de orientación avanzada |
Acelerómetro, Gyro, Compass |
Equipo de prueba sugerido
Para los fines de este documento, se usaron los siguientes elementos de hardware para ayudar a ejecutar las pruebas WHLK. Aunque estos dispositivos no son necesarios para WHLK, pueden ayudar al ingeniero de validación a recorrer las pruebas más fácilmente si se usan.

Figura 1 Equipo de prueba sugerido
Teclado Bluetooth
Mouse Bluetooth
Brújula /GPS
Pinza y cinta para sujetar el sistema
Giratoria giratoria (por ejemplo, un Lazy Susan)
Herramienta de diagnóstico del sensor
Estos dispositivos adicionales ayudan a probar un sistema de factor de forma de tableta (donde se requieren acelerómetros, giros, brújula, inclinómetro y sensores de orientación). Para otras configuraciones, es posible que estas herramientas no se apliquen. El resto de este documento solo se centrará en la tableta y no en otros factores de forma.
La herramienta de diagnóstico del sensor (sensordiagnostictool.exe disponible en el WDK) es útil para depurar errores de prueba. Esta herramienta mostrará los datos que se devuelven en tiempo real desde los distintos sensores de movimiento que se pueden comparar con los resultados esperados.
Comprobar la orientación del sensor: acelerómetro 3D
Ámbito de prueba: esta prueba comprueba que el acelerómetro está correctamente orientado en el sistema. Las pruebas tienen una tolerancia a errores de +/- 0,1 G.
Requisitos previos antes de ejecutar esta prueba:
Compruebe manualmente que la asignación automática de pantalla funciona según lo previsto.
Use SDT y compruebe que los sensores no muestran nuevos eventos de datos al sentarse de forma fija.
Una vez superados estos requisitos previos sencillos, continúe con la ejecución de la prueba WHLK. Si se producen errores con las pruebas, asegúrese de que el dispositivo está en la orientación correcta según este documento. Los fabricantes de equipos con preguntas deben ponerse en contacto primero con su fabricante de sensores (IHV) para identificar cómo pasaron las pruebas de WHLK antes de ponerse en contacto con Microsoft para obtener ayuda con las pruebas de WHLK.
Prueba de acelerómetro 1
Mantenga el dispositivo perpendicular a una superficie plana y de nivel con el botón Windows en la parte inferior.
Valores esperados:
SENSOR_DATA_TYPE_ACCELERATION_X_G |
0 |
SENSOR_DATA_TYPE_ACCELERATION_Y_G |
-1 |
SENSOR_DATA_TYPE_ACCELERATION_Z_G |
0 |

Figura 2 Prueba de acelerómetro 1
Acelerómetro Prueba 2
Gire el dispositivo 90 grados en el sentido de las agujas del reloj, manteniendo el dispositivo perpendicular a la superficie plana y de nivel. El botón Windows debe estar a la izquierda.
Valores esperados:
SENSOR_DATA_TYPE_ACCELERATION_X_G |
1 |
SENSOR_DATA_TYPE_ACCELERATION_Y_G |
0 |
SENSOR_DATA_TYPE_ACCELERATION_Z_G |
0 |
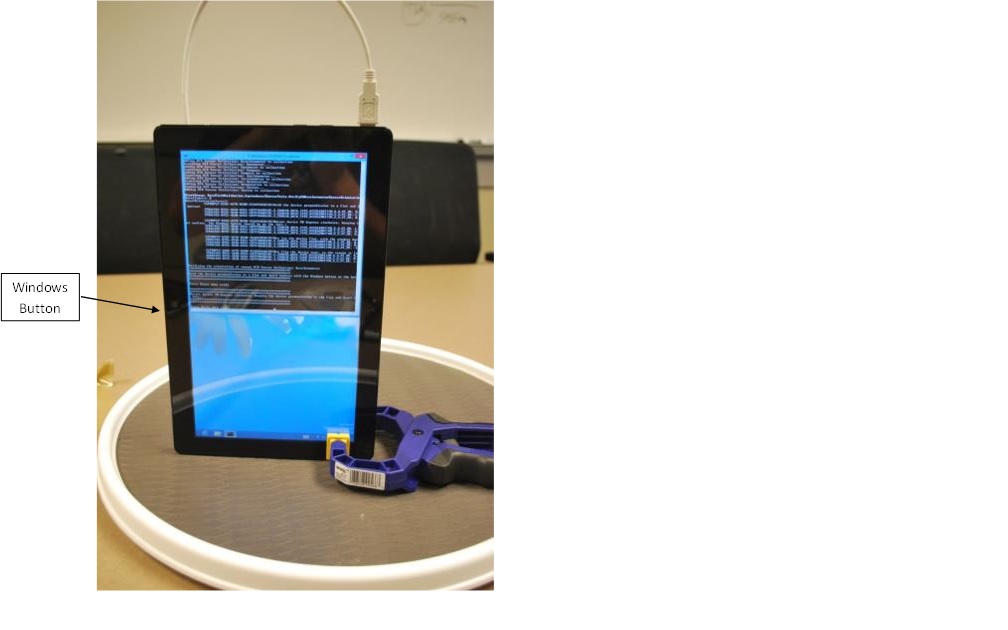
Figura 3 Prueba de acelerómetro 2
Prueba de acelerómetro 3
Ahora coloca el dispositivo plano, con el botón de ventanas lejos de usted.
Valores esperados:
SENSOR_DATA_TYPE_ACCELERATION_X_G |
0 |
SENSOR_DATA_TYPE_ACCELERATION_Y_G |
0 |
SENSOR_DATA_TYPE_ACCELERATION_Z_G |
-1 |

Figura 4 Prueba de acelerómetro 3
Prueba de acelerómetro 4
Ahora voltea el dispositivo, por lo que la pantalla está cara abajo.
Valores esperados:
SENSOR_DATA_TYPE_ACCELERATION_X_G |
0 |
SENSOR_DATA_TYPE_ACCELERATION_Y_G |
0 |
SENSOR_DATA_TYPE_ACCELERATION_Z_G |
1 |
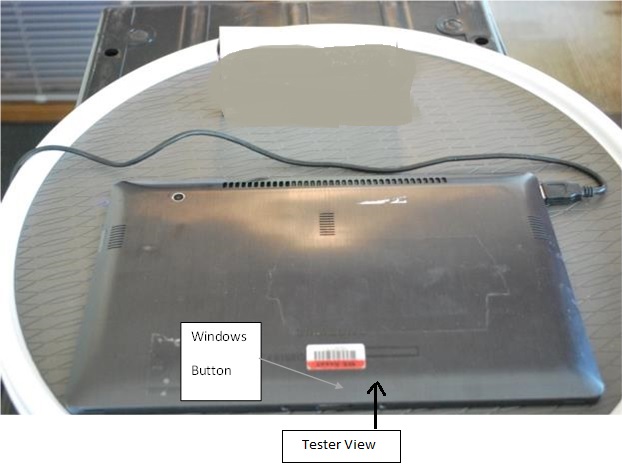
Figura 5 Prueba de acelerómetro 4
Prueba del sensor giroscopio
Ámbito de prueba:
Los giroscopios suelen emitir ruido sobre la magnitud de +/- 2 grados por segundo. Antes de ejecutar las pruebas de verificación gyroscope, los evaluadores deben usar la herramienta de diagnóstico del sensor para validar que el sensor giroscopio no genera valores superiores a 2 grados por segundo cuando el sistema está estacionado.
Requisitos previos antes de ejecutar esta prueba:
Se superan las pruebas de acelerómetro.
Use SDT y compruebe que los sensores no devuelven datos al sentarse en una superficie plana.
Si el sensor de giroscopio está generando ruido excesivo, los evaluadores deben trabajar con el fabricante del sensor para comprender y corregir la fuente del ruido.
Las pruebas de giro esperan recibir una velocidad angular de más de 40 grados por segundo en el eje girando y menos de 15 grados por segundo en los ejes estacionarios. Para lograr resultados de paso, es probable que los evaluadores encuentren que el sistema se puede girar en una tabla giratoria para mantener los otros dos ejes estacionados. Tenga en cuenta que el sistema también debe centrarse en la tabla giratoria para evitar que el movimiento en otros ejes detecte la rotación.
Gyro Test 1
Pone el dispositivo plano con la pantalla arriba. Gire el dispositivo en el sentido de las agujas del reloj.
Valores esperados durante la rotación:
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_X_DEGREES_PER_SECOND_SQUARED |
< 15 |
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_Y_DEGREES_PER_SECOND_SQUARED |
< 15 |
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_Z_DEGREES_PER_SECOND_SQUARED |
< -40 |
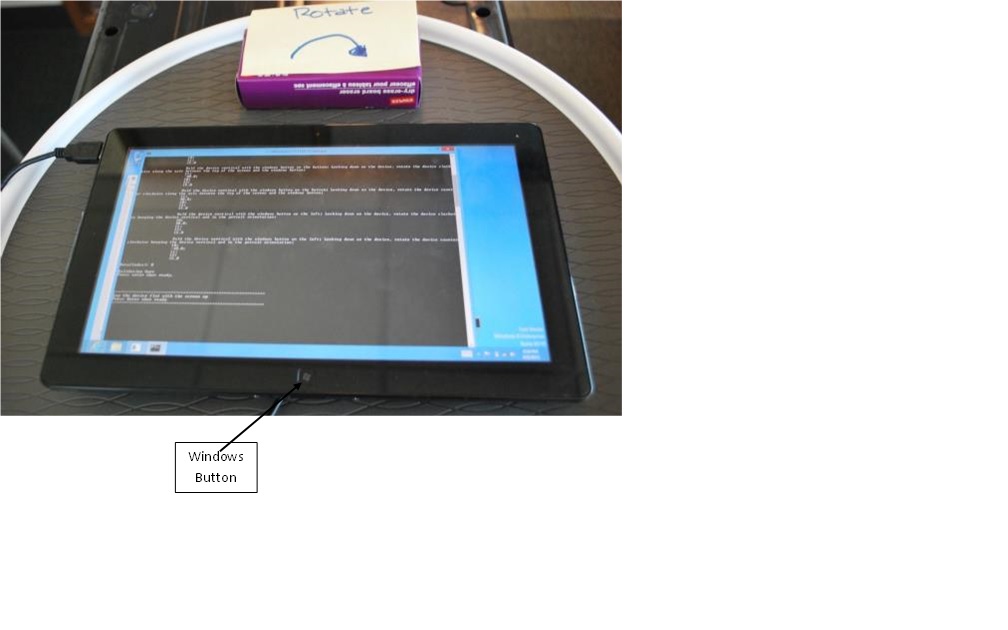
Figura 6 Gyro Test 1
Gyro Test 2
Pone el dispositivo plano con la pantalla arriba. Gire el dispositivo en sentido contrario a las agujas del reloj.
Valores esperados durante la rotación:
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_X_DEGREES_PER_SECOND_SQUARED |
< 15 |
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_Y_DEGREES_PER_SECOND_SQUARED |
< 15 |
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_Z_DEGREES_PER_SECOND_SQUARED |
> 40 |
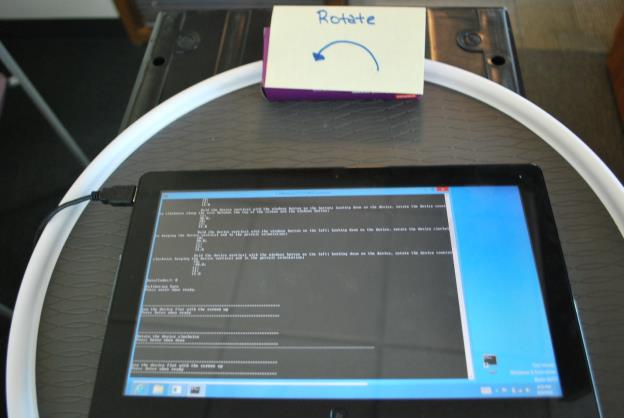
Figura 7 Gyro Test 2
Prueba de giro 3
Mantenga presionado el dispositivo verticalmente con el botón ventanas en la parte inferior. Mirando hacia abajo en el dispositivo, gire el dispositivo en el sentido de las agujas del reloj a lo largo del eje entre la parte superior de la pantalla y el botón de ventanas.
Valores esperados durante la rotación:
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_X_DEGREES_PER_SECOND_SQUARED |
< 15 |
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_Y_DEGREES_PER_SECOND_SQUARED |
< -40 |
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_Z_DEGREES_PER_SECOND_SQUARED |
< 15 |
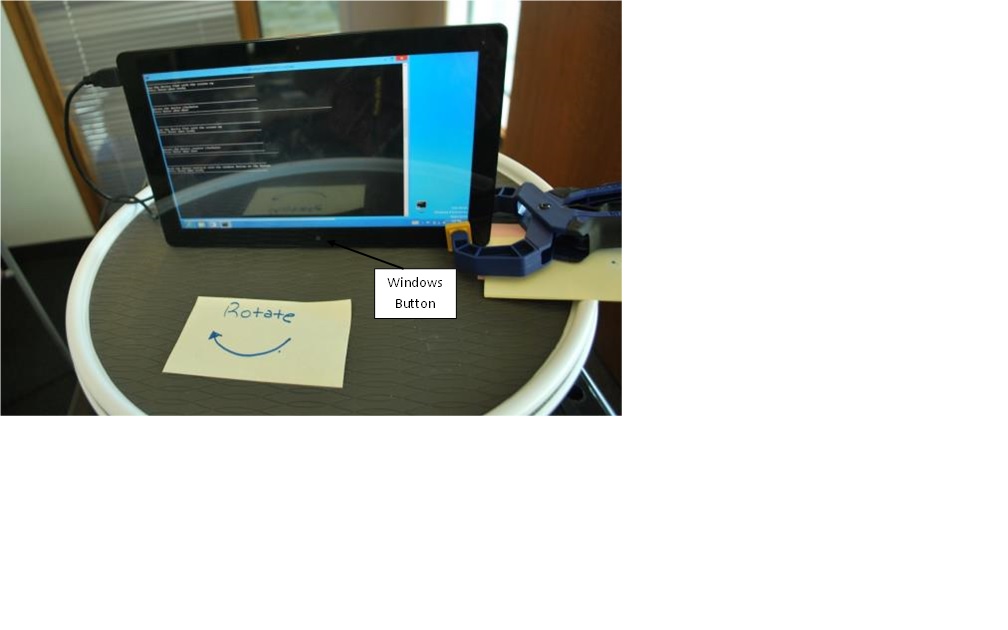
Figura 8 Prueba gyro 3
Prueba de giro 4
Mantenga presionado el dispositivo verticalmente con el botón ventanas en la parte inferior. Mirando hacia abajo en el dispositivo, gire el dispositivo en sentido contrario a las agujas del reloj a lo largo del eje entre la parte superior de la pantalla y el botón de ventanas.
Valores esperados durante la rotación:
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_X_DEGREES_PER_SECOND_SQUARED |
< 15 |
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_Y_DEGREES_PER_SECOND_SQUARED |
> 40 |
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_Z_DEGREES_PER_SECOND_SQUARED |
< 15 |
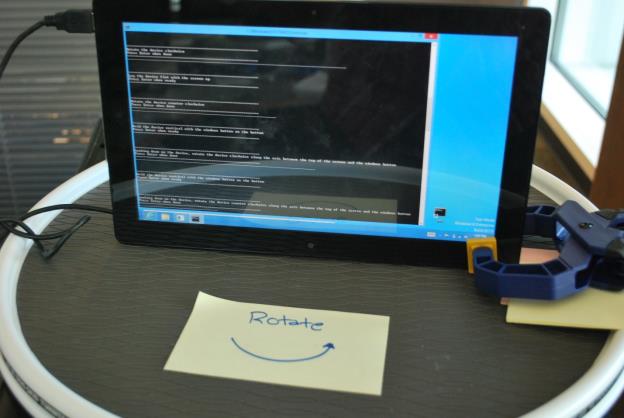
Figura 9 Prueba gyro 4
Prueba de giro 5
Mantenga presionado el dispositivo verticalmente con el botón ventanas a la izquierda. Mirando hacia abajo en el dispositivo, gire el dispositivo en el sentido de las agujas del reloj manteniendo el dispositivo vertical y en la orientación vertical.
Valores esperados durante la rotación:
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_X_DEGREES_PER_SECOND_SQUARED |
> 40 |
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_Y_DEGREES_PER_SECOND_SQUARED |
< 15 |
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_Z_DEGREES_PER_SECOND_SQUARED |
< 15 |

Figura 10 Prueba gyro 5
Prueba de giro 6
Mantenga presionado el dispositivo verticalmente con el botón ventanas a la izquierda. Mirando hacia abajo en el dispositivo, gire el dispositivo en sentido contrario a las agujas del reloj manteniendo el dispositivo vertical y en la orientación vertical.
Valores esperados durante la rotación:
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_X_DEGREES_PER_SECOND_SQUARED |
<-40 |
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_Y_DEGREES_PER_SECOND_SQUARED |
< 15 |
SENSOR_DATA_TYPE_ANGULAR_ACCELERATION_Z_DEGREES_PER_SECOND_SQUARED |
< 15 |
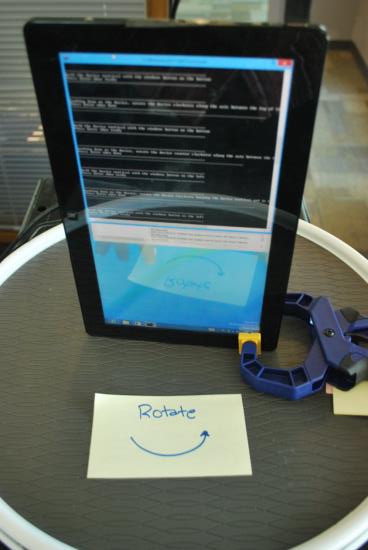
Figura 11 Gyro Test 6
Comprobar la orientación del sensor- Brújula 3D
La mayoría de las implementaciones de brújula usan datos tanto del magnetómetro 3D como del giro para calcular la dirección actual a la que se enfrenta el usuario con respecto al polo norte magnético. Algunas implementaciones también usan datos del acelerómetro. Por lo tanto, si el sensor de giroscopio o acelerómetro no funciona correctamente, los evaluadores deben esperar ver que la brújula devuelva encabezados incorrectos.
Dado que la fuerza magnética de la tierra es relativamente débil, los sensores magnetómetros a menudo estarán sujetos a interferencias de otros componentes dentro del sistema. Si los magnetómetros no están aislados adecuadamente de fuentes de interferencia electromagnética como antenas, líneas de alimentación u otros componentes compuestos de materiales como el hierro que interfiere con la recepción magnética, los evaluadores encontrarán que la brújula devolverá encabezados incorrectos. Consulte las notas del producto Integración de sensores de movimiento y orientación para obtener instrucciones sobre la colocación correcta del magnetómetro y los procedimientos recomendados.
Se recomienda encarecidamente al usuario mantener el sistema en varios ángulos y girarse para que terminen frente a diferentes direcciones. Independientemente del ángulo en el que se mantenga el sistema, o la orientación horizontal o vertical, la brújula siempre debe devolver el encabezado relativo a la dirección a la que está orientado el usuario. Tenga en cuenta que la herramienta de diagnóstico del sensor se puede usar para mostrar el valor de encabezado del sensor de brújula. Si los evaluadores descubren que la brújula devuelve resultados incorrectos o incoherentes, trabaje con el proveedor del sensor magnetómetro para determinar si el error es un resultado de interferencia o potencialmente un algoritmo de fusión de sensor incorrecto.
Las pruebas de brújula en el WHLK validan que la brújula devuelve los valores esperados cuando el sistema se mantiene en diferentes direcciones y orientaciones. Las pruebas de brújula permiten una tolerancia a errores de +/- 10 grados. Los evaluadores deben usar una brújula de referencia para determinar la dirección del norte magnético antes de iniciar la prueba de brújula.
Prueba de brújula 1
Coloca el dispositivo en una superficie plana con el botón Windows que apunta hacia el sur.
La brújula debe devolver un encabezado cerca de 0 grados.
Nota
Omita el texto de la excepción de registro. Esto no provocará un error al registrarse.
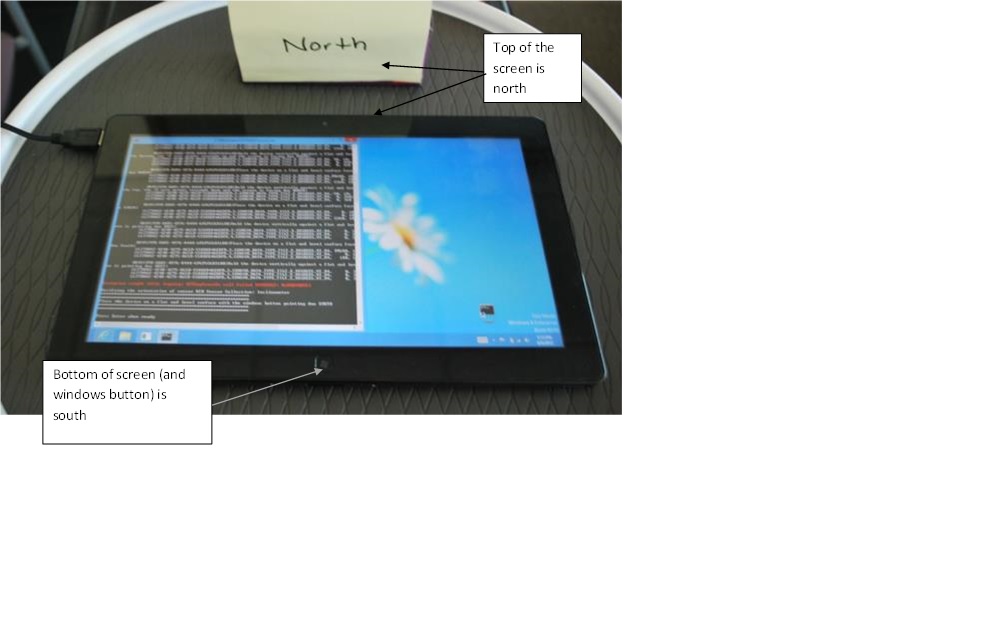
Figura 12 Prueba de brújula 1
Prueba de brújula 2
Ahora mantenga el dispositivo vertical con el botón Windows en la parte inferior, con la pantalla hacia usted. Apunte el botón Windows debido al norte.
La brújula debe devolver un encabezado cerca de 0 grados
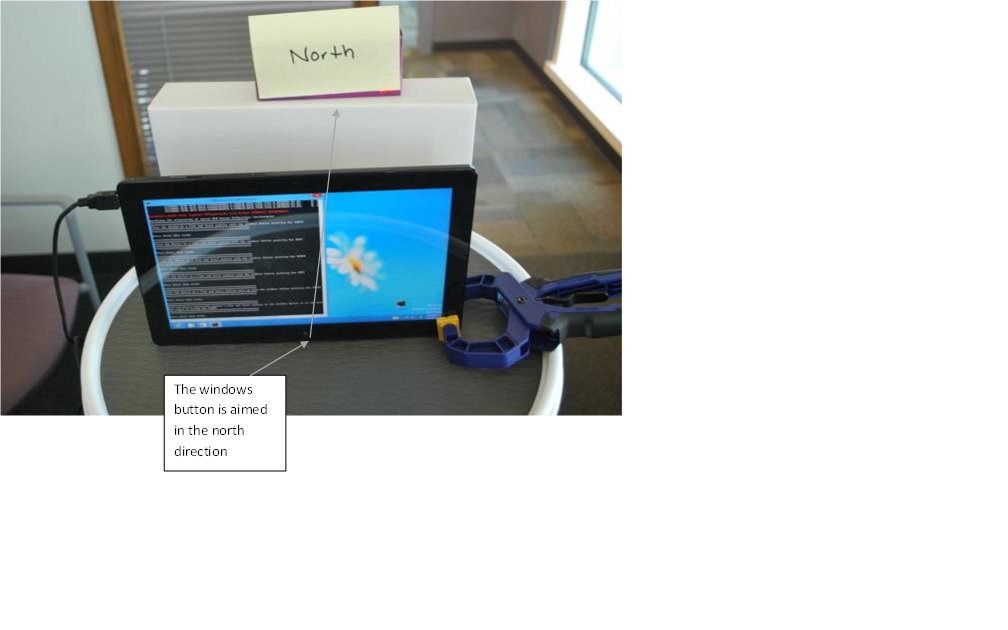
Figura 13 Prueba de brújula 2
Prueba de brújula 3
Ahora coloca el dispositivo plano, pantalla abajo con el botón de ventanas que apunta hacia el sur.
La brújula debe devolver un encabezado cerca de 0 grados.
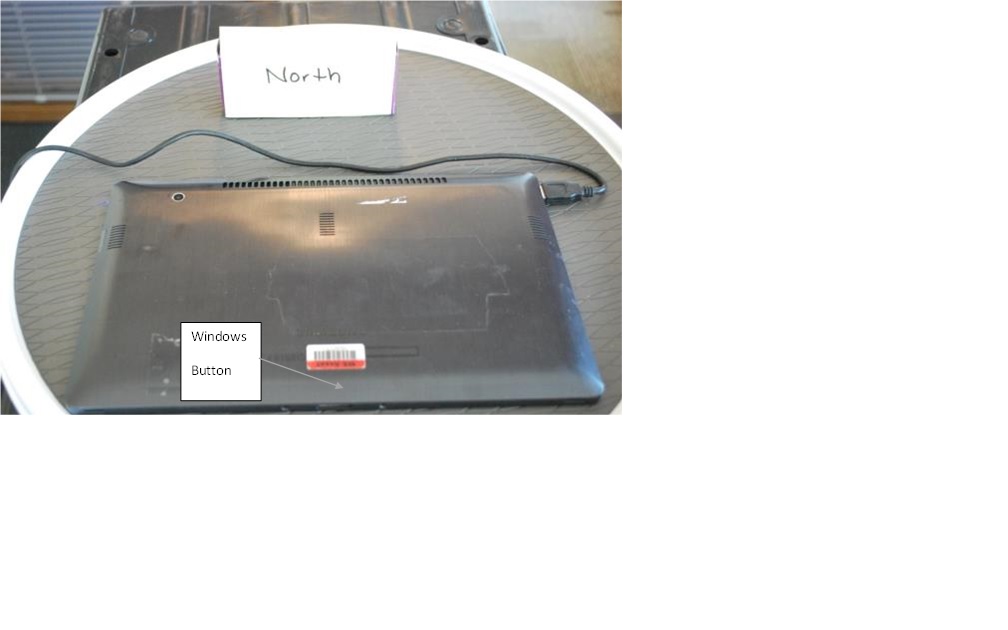
Figura 14 Prueba de brújula 3
Prueba de brújula 4
Ahora gira la pantalla 90 grados en el sentido de las agujas del reloj, por lo que el botón de Windows apunta debido a West.
La brújula debe devolver un encabezado cerca de 90 grados.

Figura 15 Prueba de brújula 4
Prueba de brújula 5
Gira la pantalla otro 90 grados en el sentido de las agujas del reloj, por lo que el botón de Windows apunta hacia el norte.
La brújula debe devolver un encabezado cerca de 180 grados.
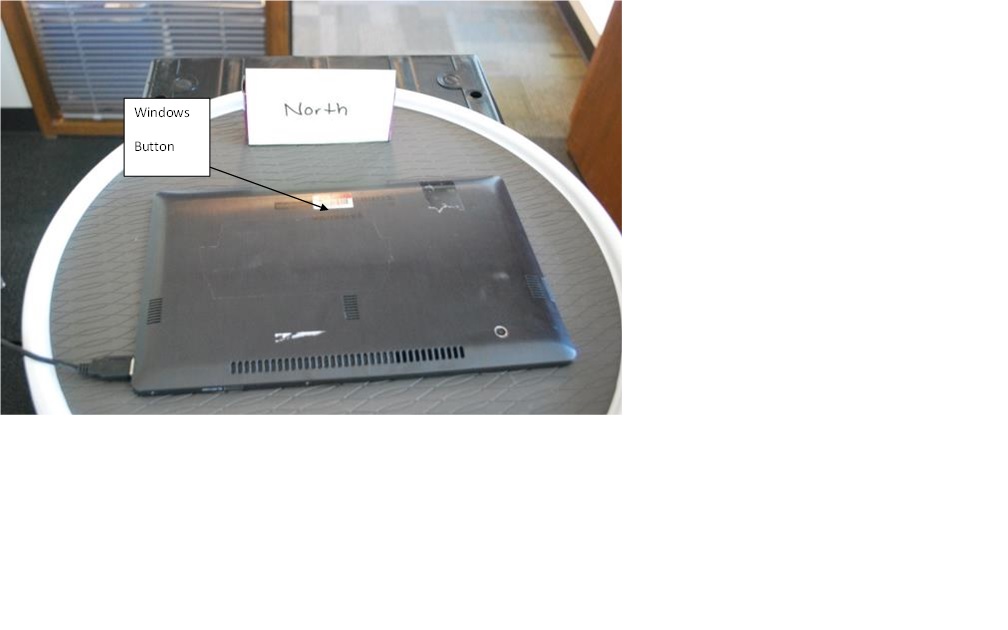
Figura 16 Compass Test 5
Prueba de brújula 6
Gire la pantalla otro 90 grados en el sentido de las agujas del reloj, por lo que el botón de Windows apunta a este.
La brújula debe devolver un valor cercano a 270 grados.
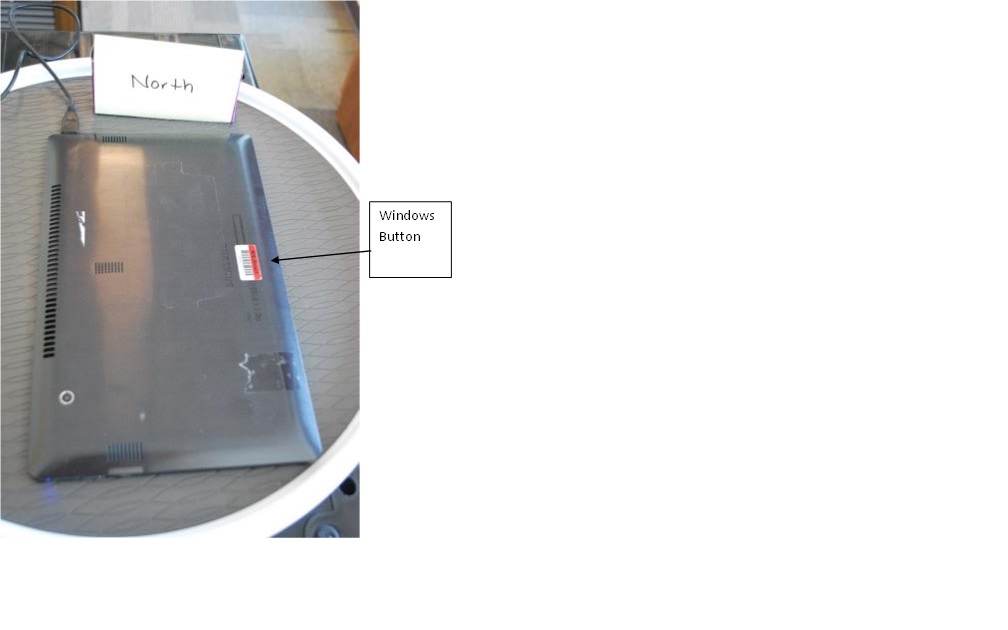
Figura 17 Prueba de brújula 6
Comprobar la orientación del sensor: inclinómetro
Según las instrucciones de las notas del producto Integrar sensores de movimiento y orientación, la implementación del inclinómetro podría usar datos del acelerómetro, giroscopio y brújula para determinar los valores angulares de Euler.
Las pruebas permitirán errores angulares de +/- 10 grados.
Importante
Consulte la sección Validación de ángulos de Euler de las notas del producto Integrar sensores de movimiento y orientación para conocer los ángulos esperados para cada una de las pruebas de inclinómetro.
Inclinometer Test 1
Coloque el dispositivo en una superficie plana y de nivel con el botón de ventanas que apunta a SOUTH.
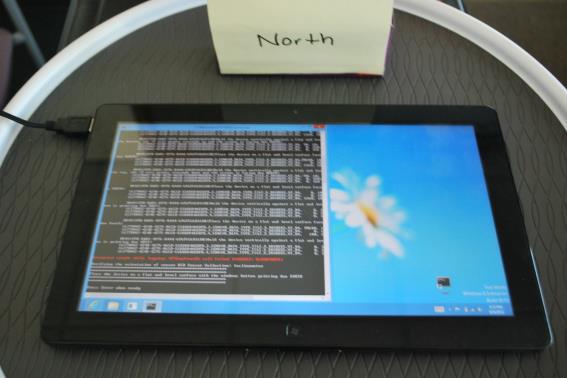
Figura 18 Inclinometer Test 1
Inclinometer Test 2
Coloque el dispositivo en una superficie plana y de nivel con el botón de ventanas que apunta a EAST.
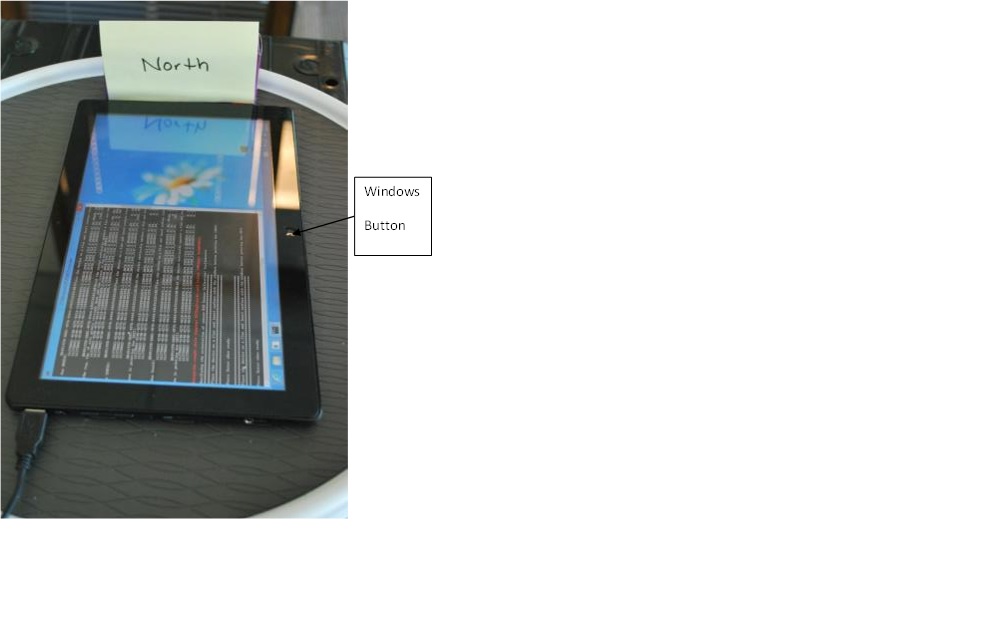
Figura 19 Inclinometer Test 2
Inclinometer Test 3
Coloque el dispositivo en una superficie plana y de nivel con el botón de ventanas que apunta a north.
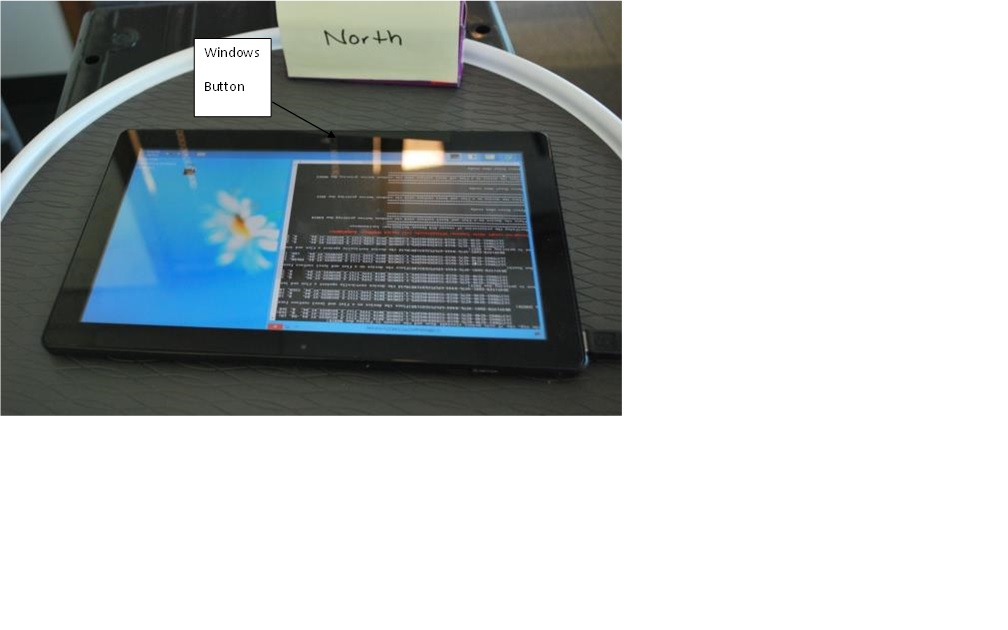
Figura 20 Inclinometer Test 3
Prueba de inclinómetro 4
Coloque el dispositivo en una superficie plana y de nivel con el botón de ventanas que apunta a west.
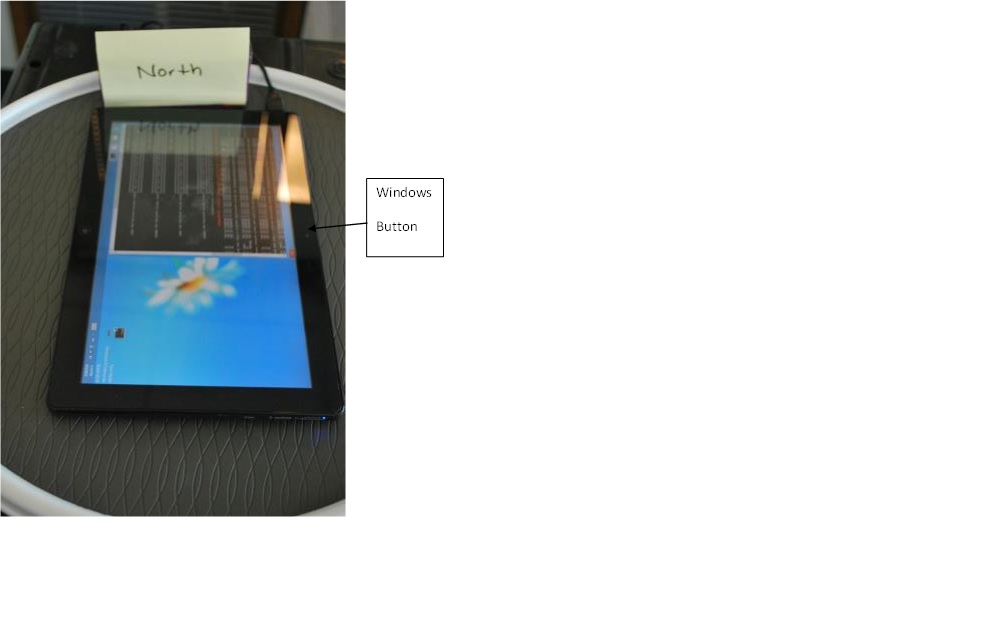
Figura 21 Inclinometer Test 4
Inclinometer Test 5
Coloque el dispositivo en una superficie plana y de nivel hacia arriba con el botón de ventanas que apunta a SOUTH.
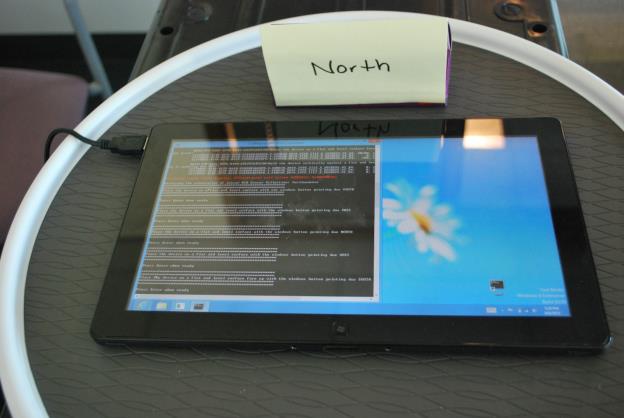
Figura 22 Inclinometer Test 5
Inclinometer Test 6
Mantenga el dispositivo verticalmente en una superficie plana y de nivel para que el botón de ventanas esté en la parte inferior, el eje +Y apunta directamente hacia arriba y la pantalla se enfrenta debido a SOUTH.
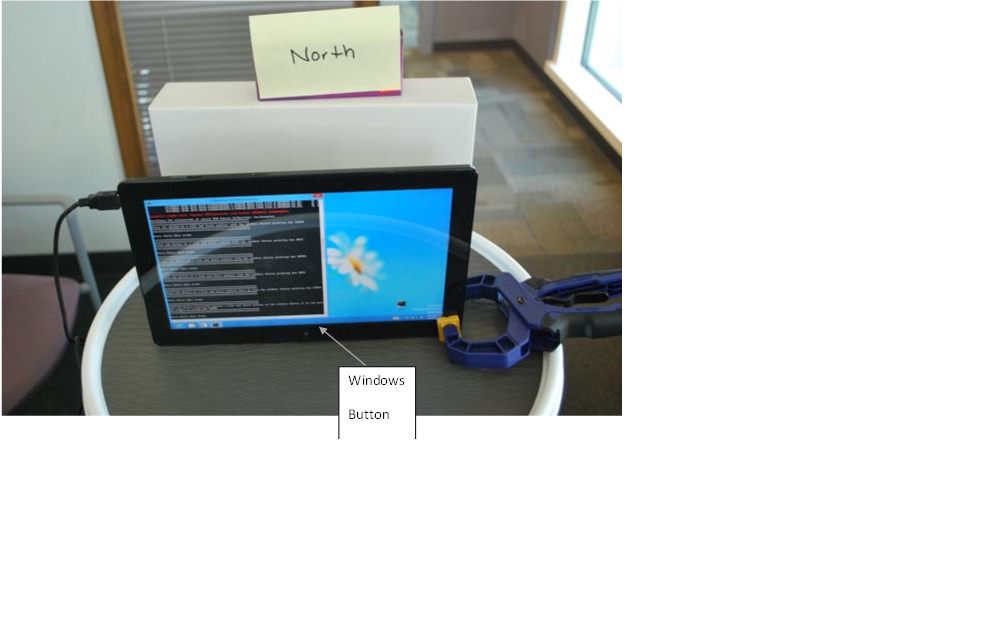
Figura 23 Inclinometer Test 6
Inclinometer Test 7
Coloque el dispositivo en una superficie plana y de nivel hacia abajo para que el botón de ventana apunte debido a NORTH.
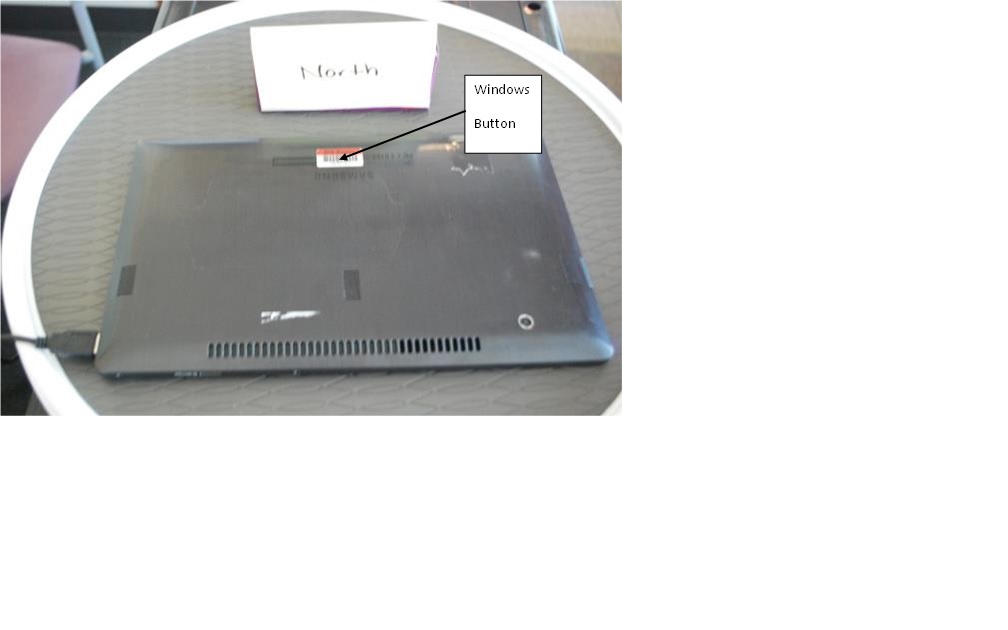
Figura 24 Inclinometer Test 7
Inclinometer Test 8
Mantenga el dispositivo verticalmente en una superficie plana y de nivel, por lo que el botón de ventanas está en la parte superior, el eje +Y apunta directamente hacia abajo y la pantalla está orientada hacia el NORTE.
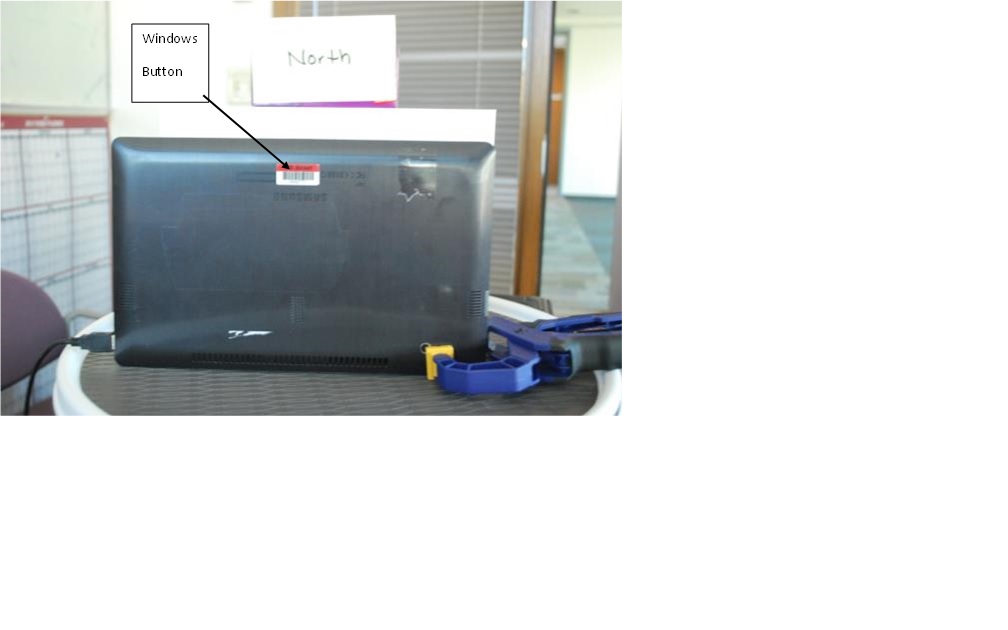
Figura 25 Inclinometer Test 8
Inclinometer Test 9
Coloque el dispositivo en una superficie plana y de nivel hacia arriba con el botón de ventanas que apunta a SOUTH.
Figura 26 Inclinometer Test 9
Inclinometer Test 10
Mantenga el dispositivo verticalmente en una superficie plana y de nivel en su lado derecho para que la pantalla apunte debido a EAST.

Figura 27 Inclinometer Test 10
Inclinometer Test 11
Coloque el dispositivo en una superficie plana y de nivel hacia abajo con el botón de ventanas que apunta a SOUTH.
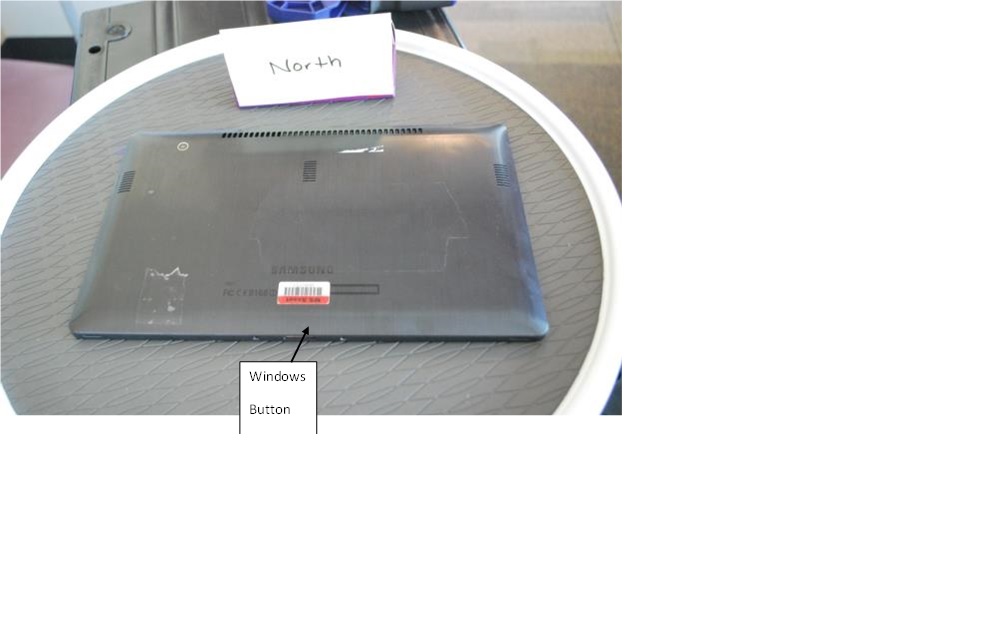
Figura 28 Inclinometer Test 11
Inclinometer Test 12
Mantenga el dispositivo verticalmente en una superficie plana y de nivel en su lado izquierdo para que la pantalla apunte debido a WEST.
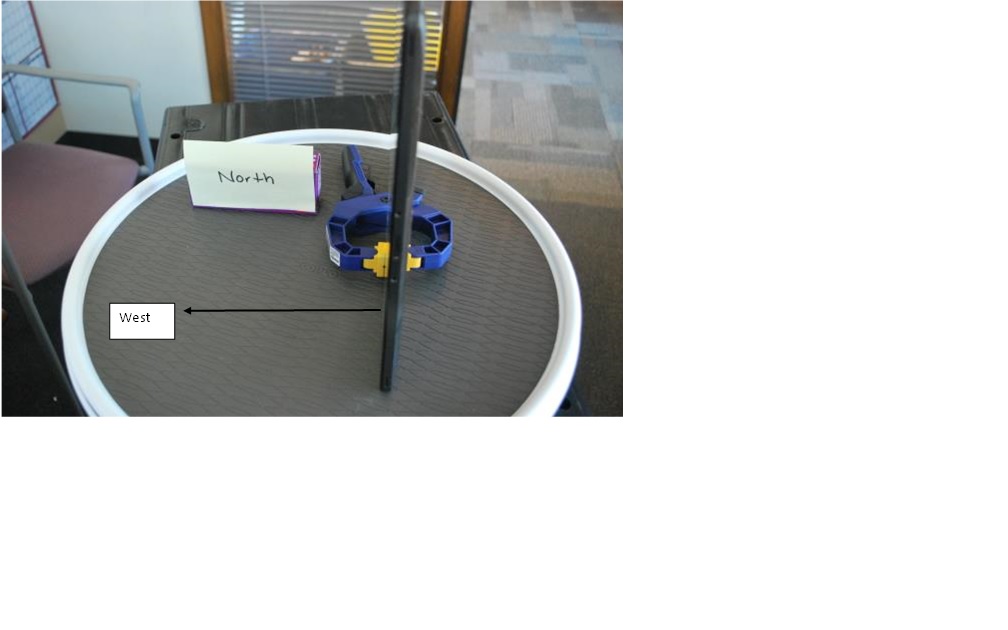
Figura 29 Inclinometer Test 12
Comprobación de sensores de orientación avanzada
La mayoría de las implementaciones de matriz de rotación y cuaternión usarán datos derivados del acelerómetro y la brújula para determinar la matriz de rotación y los valores de cuaternión. Se recomienda que los evaluadores validen primero los valores de acelerómetro y brújula antes de intentar ejecutar las pruebas de orientación avanzadas.
Las pruebas usan productos de puntos para calcular la diferencia entre el vector esperado y el vector recuperado de los sensores de orientación avanzada. Las pruebas permiten una diferencia de hasta 15 grados. Si los evaluadores encuentran que el sensor devuelve valores diferentes de los que espera la prueba, se debe revisar el algoritmo de fusión de orientación para ver que genera resultados coherentes con los valores proporcionados en las notas del producto Integración de sensores de movimiento y orientación.
Importante
Consulte la sección Validación de ángulos de Euler de las notas del producto Integración de sensores de movimiento y orientación para los valores de matriz de rotación y cuaternión esperados.
Prueba 1 del sensor de orientación avanzada
Coloque el dispositivo en una superficie de nivel plano, pantalla arriba con el botón de ventanas que apunta debido a SOUTH.
Figura 30 Prueba 1 del sensor de orientación avanzada
Prueba 2 del sensor de orientación avanzada
Coloque el dispositivo en una superficie de nivel plano, pantalla arriba con el botón de ventanas que apunta debido a EAST.
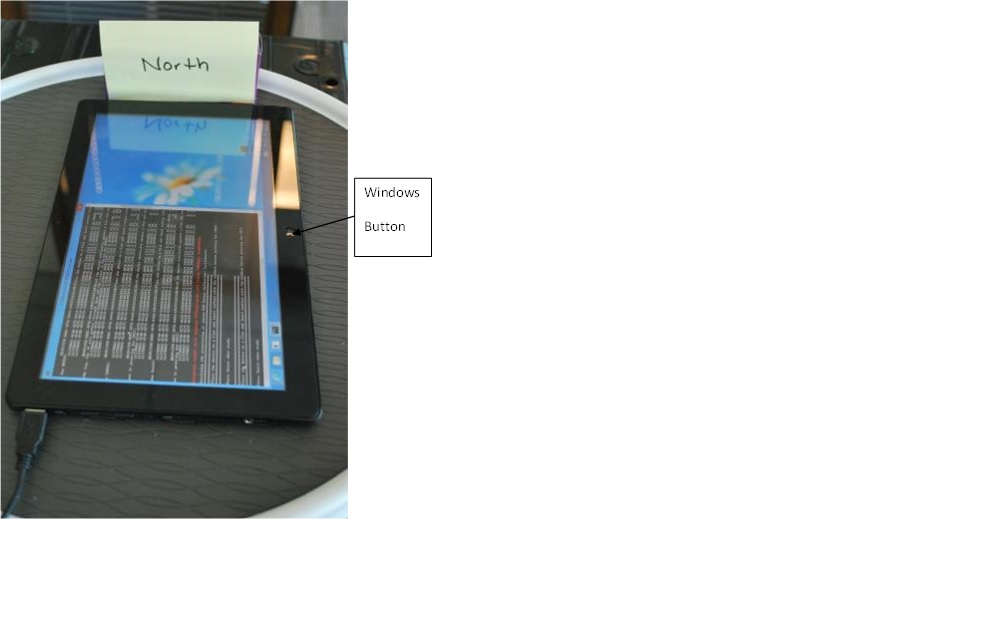
Figura 31 Prueba 2 del sensor de orientación avanzada
Prueba 3 del sensor de orientación avanzada
Coloque el dispositivo en una superficie de nivel plano, pantalla arriba con el botón de ventanas que apunta debido a NORTH.
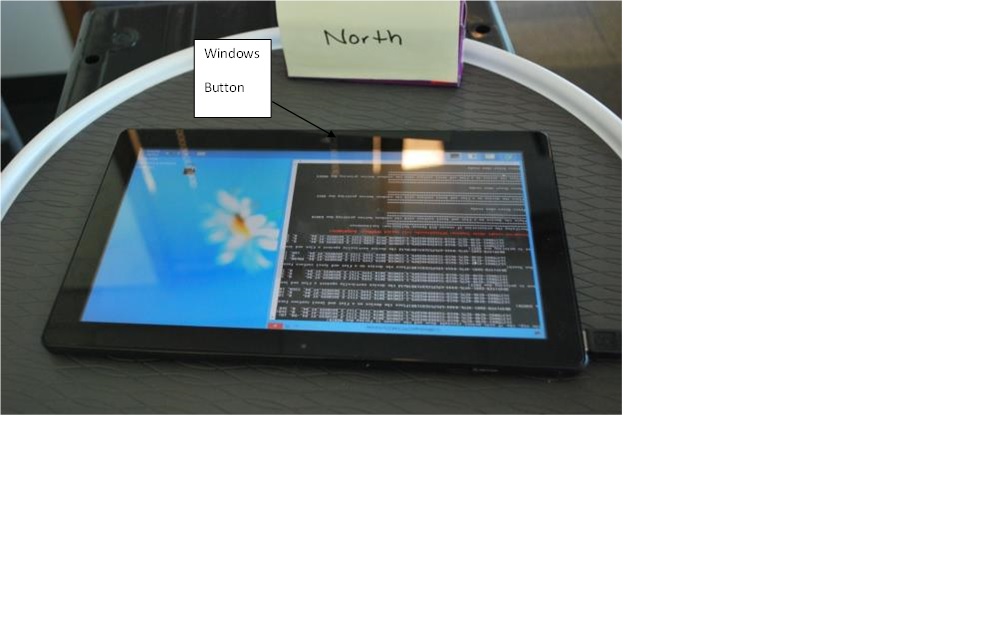
Figura 32 Prueba 3 del sensor de orientación avanzada 3
Prueba 4 del sensor de orientación avanzada
Coloque el dispositivo en una superficie de nivel plano, pantalla arriba con el botón de ventanas que apunta a west.

Figura 33 Prueba 4 del sensor de orientación avanzada
Prueba 5 del sensor de orientación avanzada
Coloque el dispositivo en una superficie de nivel plano, pantalla arriba con el botón de ventanas que apunta debido a SOUTH.
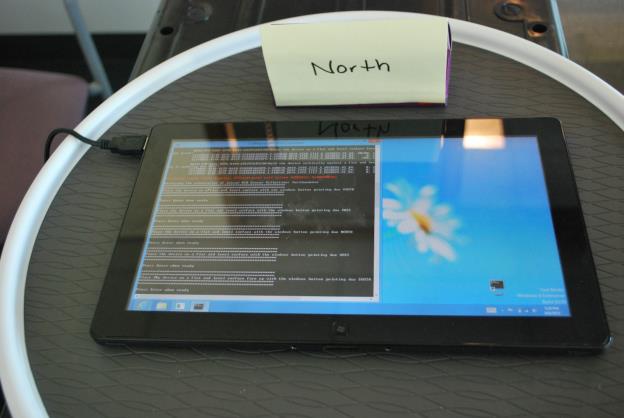
Figura 34 Prueba 5 del sensor de orientación avanzada
Prueba 6 del sensor de orientación avanzada
Mantenga presionado el dispositivo verticalmente con el botón ventanas en la parte inferior y el botón ventanas que apunta debido a SOUTH.
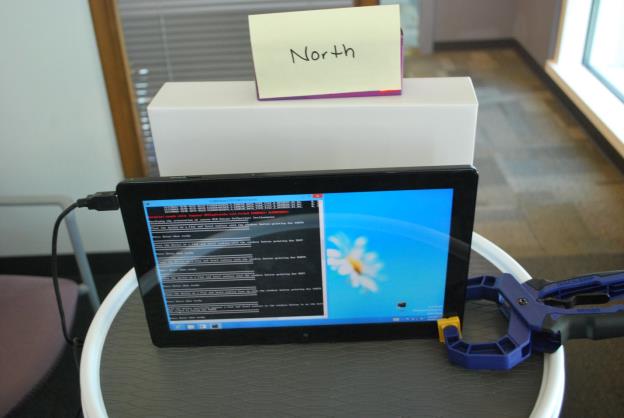
Figura 35 Prueba 6 del sensor de orientación avanzada
Prueba 7 del sensor de orientación avanzada
Coloque el dispositivo en una superficie de nivel plano con pantalla hacia abajo y el botón de ventanas que apunta debido a NORTH.
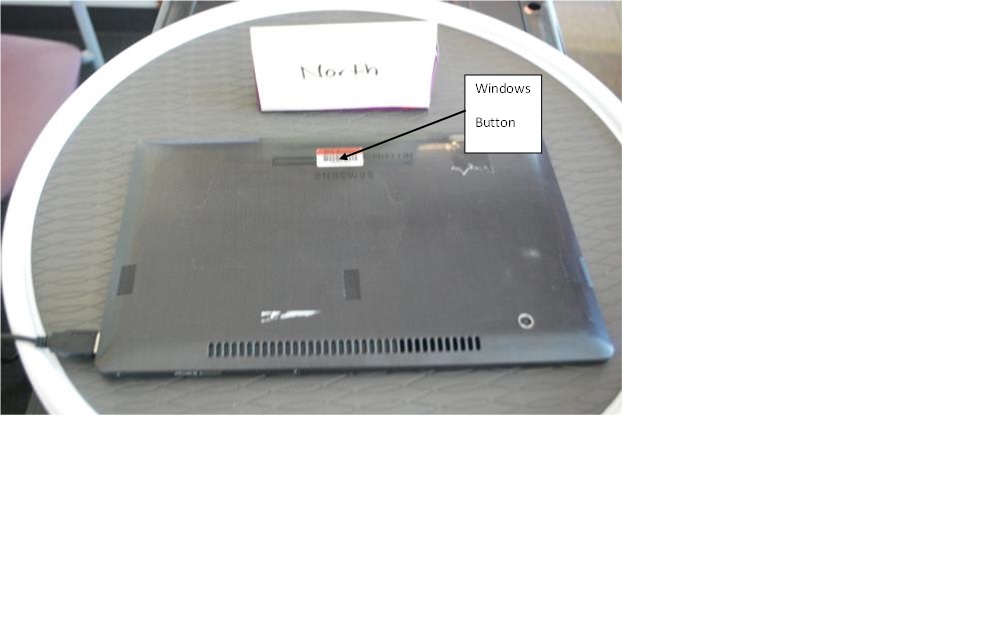
Figura 36 Prueba 7 del sensor de orientación avanzada
Prueba 8 del sensor de orientación avanzada
Coloque el dispositivo en una superficie de nivel plano con pantalla hacia abajo y el botón de ventanas que apunta debido a NORTH.
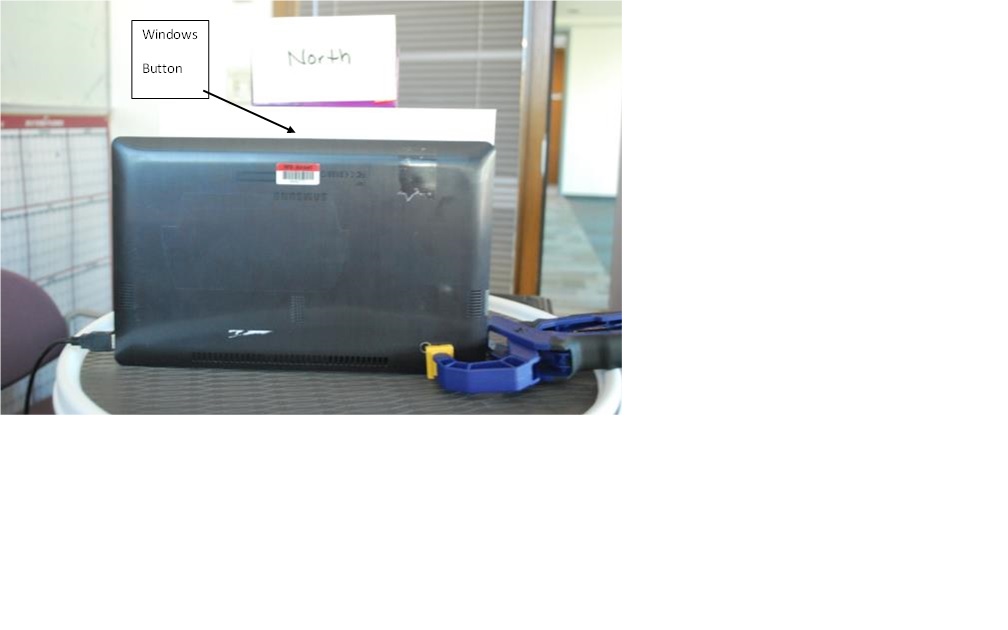
Figura 37 Prueba 8 del sensor de orientación avanzada
Prueba 9 del sensor de orientación avanzada
Coloque el dispositivo en una superficie de nivel plano, pantalla arriba con el botón de ventanas que apunta debido a SOUTH.
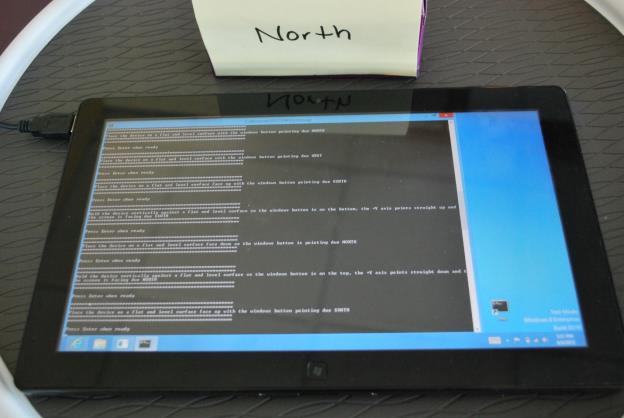
Figura 38 Prueba 9 del sensor de orientación avanzada
Prueba 10 del sensor de orientación avanzada
Mantenga el dispositivo verticalmente con el botón ventanas en el lado, el lado izquierdo en la parte superior y el botón de ventanas que apunta debido a EAST.

Figura 39 Prueba 10 del sensor de orientación avanzada
Prueba 11 del sensor de orientación avanzada
Coloque el dispositivo en una superficie de nivel plano con pantalla abajo y el botón de ventanas que apunta debido a SOUTH.
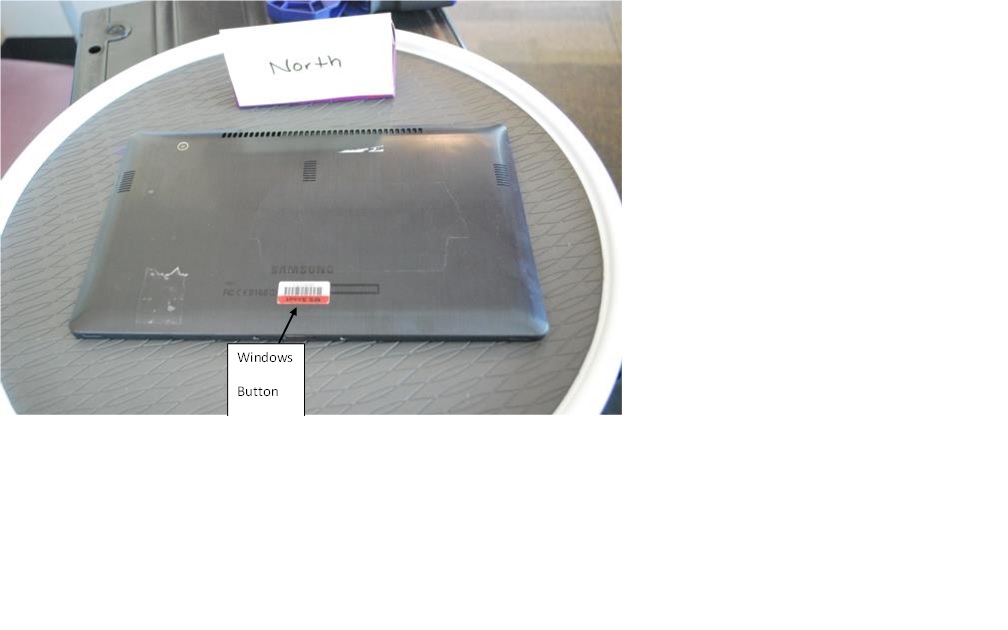
Figura 40 Prueba 11 del sensor de orientación avanzada
Prueba 12 del sensor de orientación avanzada
Mantenga el dispositivo verticalmente con el botón ventanas en el lado, el lado izquierdo en la parte inferior y el botón de ventanas que apunta a west.
Figura 41 Prueba 12 del sensor de orientación avanzada